แผนผังการควบคุมไดรฟ์ไฟฟ้าจากหลายตำแหน่ง
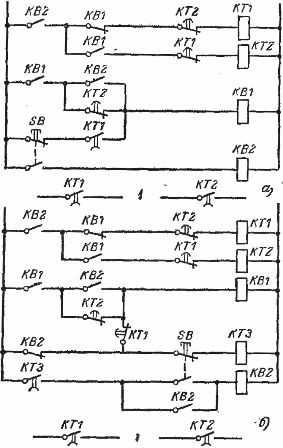
 สำหรับไลน์การผลิตแบบต่อเนื่อง ที่ซึ่งไดร์ฟทำงานในทิศทางเดียวเป็นหลัก (ไปข้างหน้า) และการกลับตัวนั้นเกิดขึ้นได้ยาก ขอแนะนำให้ใช้วงจร (รูปที่ 1) โดยมีคอนแทคเตอร์สำหรับการทำงาน "ไปข้างหน้า" ผ่านเบรกเกอร์ และ สำหรับการดำเนินการ "ย้อนกลับ" — ผ่านการสั่งงานหน้าสัมผัสของคอนแทค KMR การจัดเรียงนี้ช่วยลดเวลาในการเริ่มไดรฟ์ในทิศทางที่ต้องการ
สำหรับไลน์การผลิตแบบต่อเนื่อง ที่ซึ่งไดร์ฟทำงานในทิศทางเดียวเป็นหลัก (ไปข้างหน้า) และการกลับตัวนั้นเกิดขึ้นได้ยาก ขอแนะนำให้ใช้วงจร (รูปที่ 1) โดยมีคอนแทคเตอร์สำหรับการทำงาน "ไปข้างหน้า" ผ่านเบรกเกอร์ และ สำหรับการดำเนินการ "ย้อนกลับ" — ผ่านการสั่งงานหน้าสัมผัสของคอนแทค KMR การจัดเรียงนี้ช่วยลดเวลาในการเริ่มไดรฟ์ในทิศทางที่ต้องการ
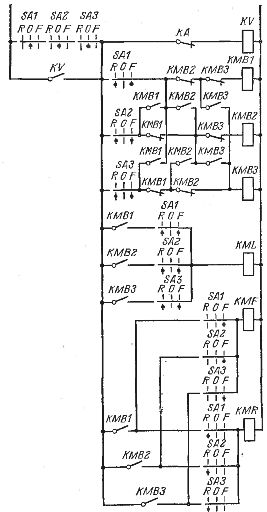
แผนภาพในรูป 2 ช่วยให้สามารถควบคุมมอเตอร์ไฟฟ้าแบบย้อนกลับได้จากระยะไกลจากวัตถุที่กำลังเคลื่อนที่ ตัวอย่างเช่นวงจรนี้ใช้เพื่อควบคุมมอเตอร์ของบ่อทำความร้อนจากปั้นจั่น วงจรสัญญาณและการรับสัญญาณต่างๆ แสดงในรูป 3 — 9.
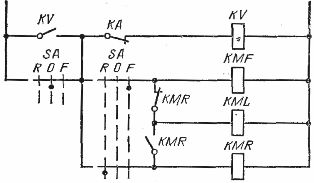
ข้าว. 1. รูปแบบการควบคุมเครื่องยนต์ด้านหลังด้วย «ด้านหลัง» ที่หายาก
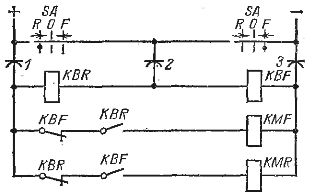
ข้าว. 2. รูปแบบการควบคุมมอเตอร์แบบพลิกกลับได้โดยใช้การหมุนรอบควบคุม
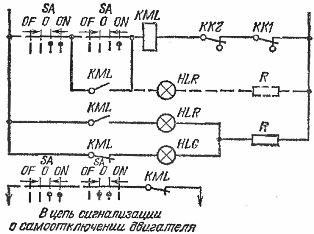
ข้าว. 3. โครงการส่งสัญญาณสถานะของไดรฟ์ไฟฟ้ากลับไม่ได้
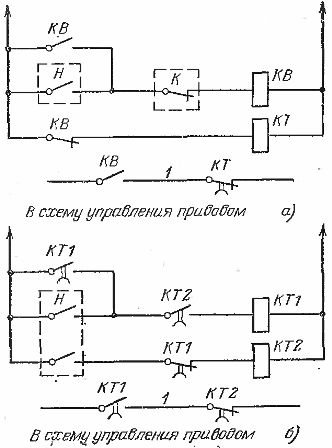
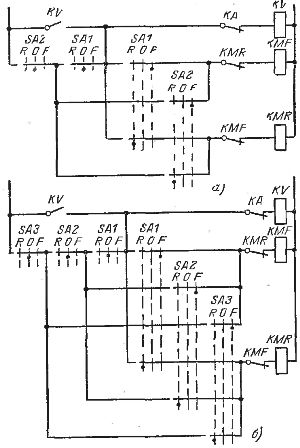
ข้าว. 4.วงจรสำหรับการรับสัญญาณที่มีการหน่วงเวลาหลังจากเริ่มสัมผัสกับสัญญาณยาว (a) และพัลซิ่ง (b): K - หน้าสัมผัสปลดล็อค 1 - หน้าสัมผัสไปยังวงจรควบคุมของไดรฟ์
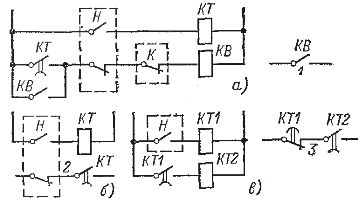
ข้าว. 5. แบบแผนสำหรับการรับสัญญาณหลังจากสิ้นสุดจังหวะ (จากหาง) ของสัญญาณ H ยาว (a), ชีพจร (b), ชีพจรที่มีการหน่วงเวลา (c) K — หน้าสัมผัสปลดล็อค 1, 2, 3 — หน้าสัมผัสวงจรควบคุมไดรฟ์
ข้าว. 6. แผนการรับสัญญาณยาวหลังจากเริ่มต้น H. รอง
ข้าว. 7. รูปแบบการรับสัญญาณพัลส์ที่มีการหน่วงเวลาหลังจากการกระทำรองของสัญญาณ H (KT1 คือ 0.2-0.8 วินาที; KT2 0.3 วินาที; KTZ 0.5 วินาที) 1 — หน้าสัมผัสวงจรควบคุมไดรฟ์
ข้าว. 8. รูปแบบการรับสัญญาณในช่วงเวลาหนึ่งโดยไม่คำนึงถึงระยะเวลาที่กดปุ่ม: 1 — สัมผัสกับวงจรควบคุมไดรฟ์
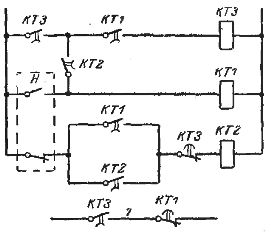
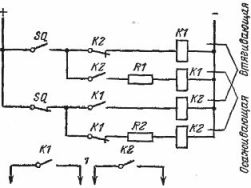
รูปแบบการนับจะใช้เพื่อส่งผลต่อไดรฟ์โดยอัตโนมัติหลังจากนับการดำเนินการหรือรอบตามจำนวนที่กำหนด สามารถนับการปิดและการเปิด (รูปที่ 10) การปิดเท่านั้น (รูปที่ 11) หรือการเปิดเท่านั้น (รูปที่ 12)
การนับพัลส์ตามแผนผังที่ระบุนั้นมาจากหน้าสัมผัสโฟโต้รีเลย์ สวิตช์ควบคุมการเคลื่อนไหว หรืออุปกรณ์อื่นๆ
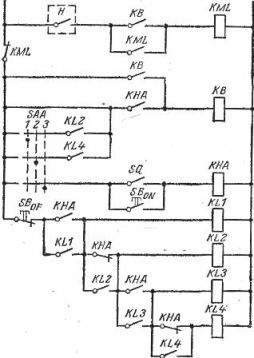
ในรูปแบบการนับที่แสดงในรูป 10, รีเลย์ REV850 ใช้กับกระดองแม่เหล็ก "เกาะติด" ดังนั้นการหยุดชะงักของการจ่ายแรงดันไฟฟ้าไปยังวงจรนี้จึงไม่รบกวนการนับ ในวงจรนับอื่น ๆ เมื่อแรงดันไฟฟ้าถูกขัดจังหวะ จะมีการสูญเสียการนับพัลส์
เพื่อตรวจสอบความถูกต้องของรูปแบบบัญชี (รูปที่ 11) ปุ่มควบคุม… แต่ละครั้งที่คุณกดปุ่ม SB0N วงจรจะทำการนับหนึ่ง ปุ่ม SB0F ใช้เพื่อรีเซ็ตตัวนับปุ่มดังกล่าวสามารถให้ในรูปแบบอื่นได้เช่นกัน
ข้าว. 9. วงจรรับสัญญาณ 2 วงจร โดยกดปุ่มเดียวต่อเนื่องกัน ก — ระยะเวลาของสัญญาณเท่ากับระยะเวลาที่กดปุ่ม ข — ระยะเวลาของสัญญาณไม่ขึ้นอยู่กับระยะเวลาที่กดปุ่ม , 1 — หน้าสัมผัสวงจรควบคุมไดรฟ์
ข้าว. 10. โครงร่างของบัญชีมากถึงสองบัญชี
พัลส์สำหรับแต่ละหมายเลขคือการปิดหนึ่งครั้งและการเปิดหนึ่งครั้งของหน้าสัมผัสของลิมิตสวิตช์ SQ 1 — หน้าสัมผัสวงจรควบคุมไดรฟ์
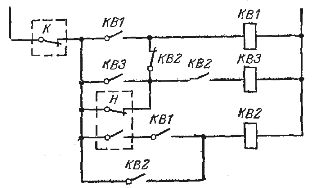
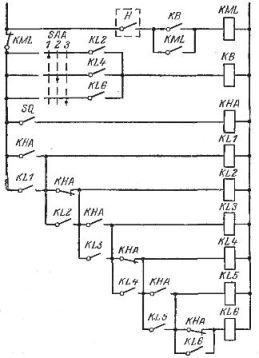
การนับพัลส์ในวงจรของรูปที่ 11, 12 เป็นการปิดระยะสั้น (ช่องเปิด) ของหน้าสัมผัส SQ และสถานะปิดของหน้าสัมผัสนี้ควรจะเพียงพอที่จะเปิดอิมพัลส์คอนแทคเตอร์ KNA และรีเลย์ KB (KL) หนึ่งตัว
ข้าว. 11. แผนการนับถึงสามเมื่อปิดการติดต่อ SQ
ข้าว. 12. โครงการนับถึงสามเมื่อเปิดหน้าสัมผัส SQ
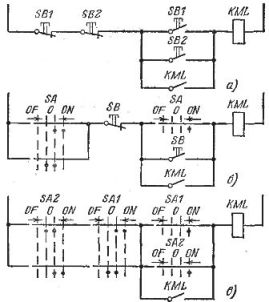
ข้าว.13. รูปแบบการควบคุมเครื่องยนต์กลับไม่ได้จากสองที่: a - มีสองปุ่ม, b - ด้วยปุ่มและปุ่ม, c - มีสองปุ่ม
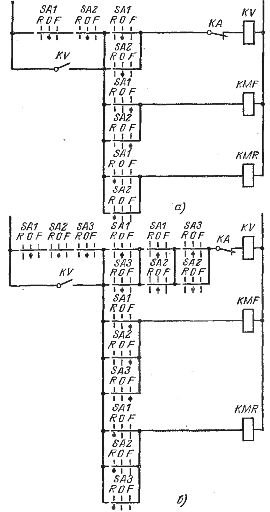
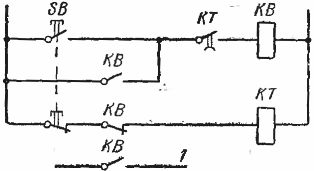
ข้าว. 14. รูปแบบของการควบคุมไดรฟ์ไฟฟ้าแบบพลิกกลับได้ด้านเดียวจากสองแห่ง
จำนวนจะถูกรีเซ็ตโดยคอนแทคสาย KML เวลาปิดของคอนแทค SQ ต้องน้อยกว่าเวลาเปิดของคอนแทค KML
โครงร่างการนับสำหรับตัวเลขที่ใหญ่กว่าเล็กน้อยสามารถวาดขึ้นได้โดยการเปรียบเทียบกับโครงร่างข้างต้น แต่เมื่อการนับมากกว่าห้าหรือแปดหรือในกรณีที่ไม่สามารถยอมรับการสูญเสียการนับเมื่อแรงดันไฟฟ้าหายไป ขอแนะนำให้ใช้ตัวเลข รีเลย์
ข้าว. 15. แบบแผนของการควบคุมเครื่องยนต์แบบพลิกกลับได้ขึ้นอยู่กับ: a - จากสองแห่ง, b - จากสามแห่ง
สามารถใช้รีเลย์นับก้าวของมอเตอร์ประเภท E-526 ได้ถึง 30 นับ หรือรีเลย์นับพัลส์ประเภท E 531 ที่มีจำนวนพัลส์สูงสุด 75 นับ รีเลย์ทำงานด้วยไฟฟ้ากระแสสลับและหน้าสัมผัสช่วยให้ปิดเครื่องได้ที่ 220 V ตามลำดับ AC และ DC 50 และ 30 วัตต์
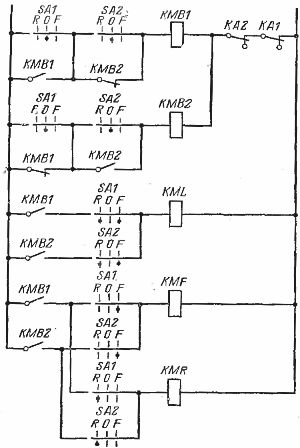
วงจรควบคุมของมอเตอร์ไฟฟ้าจากหลายแห่งสามารถขึ้นอยู่กับทิศทางเดียวและเป็นอิสระ (รูปที่ 13) ส่วนใหญ่มักใช้รูปแบบการควบคุมที่ขึ้นต่อกัน (รูปที่ 15) เป็นวิธีที่ง่ายที่สุด ตามรูปแบบเหล่านี้ เมื่อใช้งานอุปกรณ์ควบคุมใด ๆ การเลื่อนที่จับของอุปกรณ์อื่นจากศูนย์ไปยังตำแหน่งการทำงานจะทำให้มอเตอร์หยุดทำงาน
ตามรูปแบบของการควบคุมแบบพึ่งพาทางเดียวจากตำแหน่งสองตำแหน่ง (รูปที่ 14) และสามตำแหน่ง (รูปที่ 16) สวิตช์ SA1 สามารถควบคุมได้อย่างอิสระจากตำแหน่งของสวิตช์ SA2 (SA2 และ SA3) การควบคุมสวิตช์ SA2 เป็นไปได้เมื่อสวิตช์ SA1 อยู่ในตำแหน่งศูนย์และไม่ขึ้นอยู่กับตำแหน่งของสวิตช์ SA3 สามารถควบคุมสวิตช์ SA3 ได้เมื่อสวิตช์ SA1 และ SA2 อยู่ในตำแหน่งศูนย์
รูปที่ 16 แผนผังของการควบคุมทิศทางเดียวของมอเตอร์ลูกสูบสามตำแหน่ง
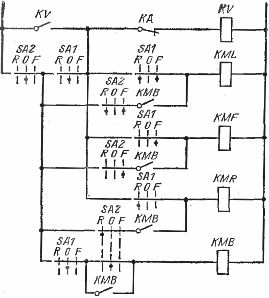
ข้าว. 17. รูปแบบการควบคุมเครื่องยนต์แบบพลิกกลับได้อิสระจากสองแห่ง
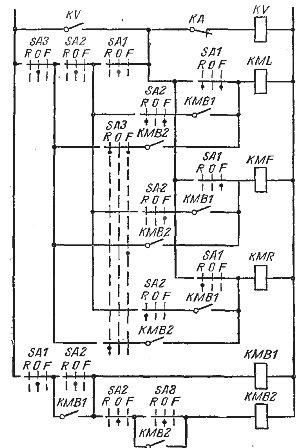
ข้าว. 18. รูปแบบการควบคุมเครื่องยนต์แบบพลิกกลับได้อิสระจากสามแห่ง
ในรูปแบบการควบคุมอิสระ (รูปที่ 17 และ 18) เมื่อไดรฟ์ถูกควบคุมโดยสวิตช์ตัวแรก (SA1, SA2 หรือ SA3) การเลื่อนที่จับของสวิตช์อีกตัวจะไม่ส่งผลต่อการทำงานของไดรฟ์ หลังจากกลับไปที่ตำแหน่งศูนย์ของแฮนเดิลของคีย์แรก แอคทูเอเตอร์จะหยุดโดยไม่คำนึงถึงตำแหน่งของแฮนเดิลของคีย์ที่สอง (หรืออีกสองอัน) การเริ่มต้นใหม่สามารถทำได้หลังจากคืนคีย์ที่สอง (หรืออีกสองปุ่ม) ไปที่ตำแหน่งศูนย์เท่านั้น
บ่อยครั้งที่พวกเขาใช้การควบคุมไดรฟ์จากสองและสามแห่งตามรูปแบบที่เรียบง่าย (รูปที่ 19) ซึ่งหมายถึงการควบคุมพิเศษจากที่หนึ่งเพียงแห่งเดียว (คีย์ SA1) เมื่อไดรฟ์ถูกควบคุมโดยสวิตช์อื่น (SA2 หรือ SA3) การเลื่อนที่จับของสวิตช์ตัวแรกจากตำแหน่งศูนย์จะทำให้การควบคุมถูกถ่ายโอนไปยังสวิตช์นั้น
ข้าว. 19. รูปแบบที่ง่ายขึ้นสำหรับการควบคุมไดรฟ์ไฟฟ้าแบบพลิกกลับได้: a - จากสองแห่ง, b - จากสามแห่ง