วิธีการทำงานของรถเข็นและการทำงาน
ผู้อยู่อาศัยในหลาย ๆ เมืองคุ้นเคยกับการนั่งรถรางจนแทบจะไม่คิดถึงข้อเท็จจริงที่ว่าในขณะนี้พวกเขากำลังใช้รูปแบบการขนส่งที่เป็นมิตรต่อสิ่งแวดล้อมและค่อนข้างประหยัด เช่น รถยนต์ไฟฟ้าแบบหลายที่นั่ง ในขณะเดียวกันอุปกรณ์ของรถเข็นก็น่าสนใจไม่น้อยไปกว่าอุปกรณ์ของรถราง มาเจาะลึกในหัวข้อนี้กัน
รถเข็นที่ทันสมัยมีชิ้นส่วนไฟฟ้าที่ค่อนข้างซับซ้อน ระบบควบคุมใช้เซมิคอนดักเตอร์ที่ควบคุมโดยไมโครโปรเซสเซอร์ ทำงานร่วมกับระบบกันสะเทือนแบบถุงลม ระบบ ABS และทำงานอย่างใกล้ชิดกับทุกส่วนในระบบข้อมูลอิเล็กทรอนิกส์ที่ซับซ้อน ซึ่งรวมถึงความเป็นไปได้ของการเคลื่อนที่แบบอิสระ ระบบควบคุมสภาพอากาศแบบปากน้ำ เป็นต้น
ดังนั้น รถรางในปัจจุบันจึงเป็นยานพาหนะสาธารณะในเมืองที่ตอบสนองความต้องการด้านความปลอดภัย ความสะดวกสบาย และมีประสิทธิภาพทั้งหมด

วิวัฒนาการของรถรางค่อยๆ พัฒนาไปในลักษณะเดียวกับรถโดยสารประจำทางเป็นเรื่องง่ายที่จะสันนิษฐานว่าโครงสร้างตัวถังของรถรางคันแรกและแชสซีนั้นแต่เดิมมาจากรถโดยสารพื้นต่ำ เช่น Bogdan-E231, MAZ-203T และอื่นๆ อย่างไรก็ตามรถเข็นเองก็ปรากฏขึ้นในภายหลัง และรถยนต์ในเมืองที่ทันสมัยเช่น Electron-T191 และ AKSM-321 เป็นต้นได้รับการพัฒนาให้เป็นรถเข็น แต่ความต่อเนื่องของร่างกายจากรุ่นสู่รุ่นยังคงสามารถตรวจสอบได้
ต้นกำเนิดของรถรางในช่วงปลายศตวรรษที่ 19:
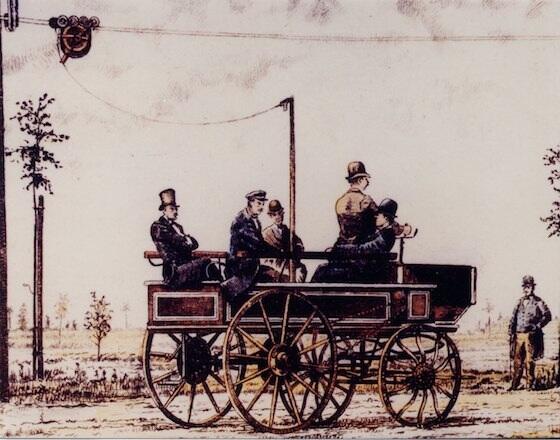
แม้แต่ในสมัยสหภาพโซเวียต พาหนะคันนี้จากโซ่ผ่านเกวียนก็กลายเป็นของแต่ง จ่ายแรงดันคงที่ 550 โวลต์… นั่นคือมาตรฐาน ภายใต้เงื่อนไขเหล่านี้ รถเข็นที่บรรทุกเต็มพิกัดสามารถเข้าถึงความเร็วประมาณ 60 กม./ชม. บนถนนเรียบ
เดิมทีไดรฟ์แบบลากมีไว้สำหรับการจราจรในเมืองดังนั้นจึงจำกัดความเร็วสูงสุดไว้ที่ 65 กม. / ชม. แต่ถึงแม้จะใช้ความเร็วนี้รถก็สามารถเคลื่อนที่ได้อย่างง่ายดายภายในระยะ 4.5 เมตรจากด้านใดด้านหนึ่งหรืออีกด้านของเส้นสัมผัส ตอนนี้เรามาสนใจกันที่อุปกรณ์ไฟฟ้าของยานพาหนะที่น่าทึ่งคันนี้
หน่วยหลักของรถเข็นคือ เครื่องยนต์ฉุด… ในเวอร์ชันคลาสสิกก็คือ มอเตอร์ไฟฟ้ากระแสตรง: โครงทรงกระบอก, กระดองพร้อมบล็อกเก็บแปรง, เสา, แผ่นปิดปลาย และพัดลม
มอเตอร์รถเข็น DC ส่วนใหญ่เป็นแบบอนุกรมหรือแบบผสม มอเตอร์ที่มีการควบคุมทรานซิสเตอร์หรือไทริสเตอร์จะทำงานร่วมกับระบบกระตุ้นแบบอนุกรมเท่านั้น
ไม่ทางใดก็ทางหนึ่ง มอเตอร์ลากรถเข็นเป็นเครื่องไฟฟ้ากระแสตรงที่ค่อนข้างน่าประทับใจ ออกแบบให้มีกำลังประมาณ 150 กิโลวัตต์ และต้องใช้ตัวแปลงไฟฟ้ากระแสตรงเพิ่มเติมเพื่อการทำงานที่เสถียรตามปกติตัวมอเตอร์สามารถรับน้ำหนักได้ประมาณหนึ่งตันและใช้กระแสไฟฟ้าประมาณ 300 A โดยมีแรงบิดเพลาในการทำงานมากกว่า 800 N * m (ที่ความเร็วเพลา 1650 รอบต่อนาที)
รถเข็นที่ทันสมัยบางรุ่นมี มอเตอร์ไฟฟ้ากระแสสลับแบบอะซิงโครนัสที่ขับเคลื่อนด้วยมอเตอร์ไฟฟ้ากระแสสลับเฉพาะ… เครื่องยนต์ประเภทนี้เทอะทะน้อยกว่า ยิ่งกว่านั้น ทรงพลังกว่า ไม่ต้องการการบำรุงรักษาตามปกติ (เมื่อเทียบกับเครื่องยนต์สะสม)
แต่เครื่องยนต์ดังกล่าวต้องการเครื่องยนต์พิเศษ ตัวแปลงสารกึ่งตัวนำ… ตัวมอเตอร์เองอาจมีเซ็นเซอร์วัดความเร็วคู่หนึ่งซึ่งติดตั้งอยู่บนเพลา มอเตอร์ลากไฟฟ้ากระแสสลับแบบอะซิงโครนัสส่วนใหญ่ใช้กำลังไฟ 400 V มีโรเตอร์กรงกระรอกและสเตเตอร์สามเฟสที่คดเคี้ยวด้วยการเชื่อมต่อแบบ "ดาว" แบบคลาสสิก

เครื่องยนต์มักจะอยู่ที่ด้านหลังของตัวรถเข็น บนเพลาขับมีหน้าแปลนโดยใช้กลไกส่งกำลังผ่านเพลา cardan ไปยังเพลาขับผ่านเฟืองขับ
ตัวเรือนมอเตอร์เป็นฉนวนอย่างสมบูรณ์จากตัวเครื่อง ดังนั้นไฟฟ้าแรงสูงจึงไม่สามารถเข้าถึงส่วนที่นำไฟฟ้าได้ นี่คือความจริงที่ว่าหน้าแปลนทำจากวัสดุฉนวนและการติดตั้งมอเตอร์บนตัวยึดจะไม่สมบูรณ์หากไม่มีปลอกหุ้มฉนวน
มอเตอร์ลากรถเข็นที่ทันสมัยขับเคลื่อนโดยระบบควบคุมพัลส์ทรานซิสเตอร์ ของทรานซิสเตอร์ IGBTซึ่งถือว่าสมบูรณ์แบบกว่าวงจรไทริสเตอร์และวงจรรีโอสแตตด้วยซ้ำ
ระบบประกอบด้วยส่วนสวิตชิ่งสำหรับเชื่อมต่อคอมพิวเตอร์วินิจฉัยเพื่อวัตถุประสงค์ในการปรับและควบคุมวงจรควบคุมเครื่องยนต์รวมถึงการตรวจสอบสภาพของอุปกรณ์ลากจูงโดยรวม ระบบควบคุมดังกล่าวประหยัดที่สุดในแง่ของการใช้พลังงาน และยังให้การสตาร์ทและการเร่งความเร็วของยานพาหนะแบบไม่ต้องสัมผัสโดยไม่สูญเสียพลังงานโดยไม่จำเป็น เช่นเดียวกับในกรณีของระบบรีโอสแตท
เป็นผลให้การควบคุมอย่างมีประสิทธิภาพของมอเตอร์ลากจูงให้รถเข็น การออกตัวที่ราบรื่น การควบคุมความเร็วแบบไร้การกด และการเบรกที่เชื่อถือได้ แรงดันพัลส์ที่ปรับได้พร้อมกระแสอาร์มาเจอร์ประมาณ 50 A ช่วยให้รถเข็นเคลื่อนที่ได้อย่างราบรื่น โดยไม่คำนึงถึงฟันเฟืองในการส่งกำลังเชิงกล
ได้รับการควบคุมความเร็วแบบไม่ต่อเนื่องเนื่องจากมีความเป็นไปได้ที่จะทำให้กระแสคอยล์สนามอ่อนลงเมื่อความเร็วของรถถึง 25 กม. / ชม. เมื่อเบรกจะใช้กระแสที่ปรับได้ซึ่งเรียกว่า การเบรกแบบไดนามิก.
รถเข็นด้านหลังจำกัดความเร็วไม่เกิน 25 กม./ชม. ด้วยระบบอิเล็กทรอนิกส์ การหยุดรถมีความสำคัญมากกว่าการสตาร์ท หากจำเป็น สามารถเปลี่ยนขั้วการทำงานของสำเนาได้

โดยตรง ระบบรถรางแบบทรานซิสเตอร์พัลส์ ทำงานดังนี้ การกดแป้นเหยียบจะเป็นการเปิดใช้งาน เซ็นเซอร์ฮอลล์, ระดับสัญญาณอะนาล็อกที่เกี่ยวข้องโดยตรงกับมุมตำแหน่งคันเหยียบปัจจุบัน
สัญญาณนี้จะถูกแปลงเป็นดิจิตอลและถูกป้อนในรูปแบบดิจิตอลแล้วไปยังตัวควบคุมไมโครโปรเซสเซอร์ของชุดลากจูง ซึ่งคำสั่งจะถูกส่งไปยังแดชบอร์ดของคนขับ ทรานซิสเตอร์กำลัง.
ในทางกลับกัน ไดรเวอร์ของทรานซิสเตอร์พลังงานจะควบคุมกระแสของทรานซิสเตอร์พลังงาน โดยขึ้นอยู่กับคำสั่งที่มาจากตัวควบคุมไมโครโปรเซสเซอร์ของชุดลากจูง แรงดันควบคุมของไดรเวอร์เป็นแรงดันต่ำ (แตกต่างกันไปตั้งแต่ 4 ถึง 8 โวลต์) และเป็นค่าที่กำหนดกระแสการทำงานของขดลวดของมอเตอร์ฉุด
คุณเดาได้ว่าทรานซิสเตอร์พลังงานให้บริการที่นี่ คอนแทคเตอร์สารกึ่งตัวนำควบคุมด้วยแรงดันไฟฟ้าซึ่งแตกต่างจากคอนแทคทั่วไปเท่านั้น ที่นี่กระแสสามารถเปลี่ยนได้อย่างราบรื่นมาก ดังนั้นจึงไม่จำเป็นต้องใช้รีโอสแตท ง่ายพอ เทคโนโลยี PWM (การปรับความกว้างของพัลส์)
หากจำเป็นต้องหยุดรถเข็นเครื่องยนต์จะเปลี่ยนเป็นโหมดเครื่องกำเนิดไฟฟ้าและโดยพื้นฐานแล้วการเบรกนั้นมาจากสนามแม่เหล็กของกระดองซึ่งจะถูกปรับด้วย ดังนั้น การเบรกทำได้เกือบจนรถหยุดสนิท โดยวิธีการที่ส่วนหลักของอิเล็กทรอนิกส์ควบคุมทรานซิสเตอร์พัลส์ของรถเข็นอยู่บนหลังคาของมัน
ในกระบวนการหยุดรถรางสมัยใหม่ ระบบจะทำงาน การกู้คืนพลังงาน… หมายความว่าพลังงานที่สร้างโดยมอเตอร์ลากในโหมดเครื่องกำเนิดไฟฟ้าระหว่างการเบรกจะถูกส่งกลับไปยังเครือข่ายหน้าสัมผัสและสามารถนำมาใช้ซ้ำได้ ทั้งสำหรับความต้องการของยานพาหนะไฟฟ้าที่ขับเคลื่อนแบบขนานจากเครือข่ายนี้ และสำหรับจ่ายไฟให้กับอุปกรณ์ต่างๆ บนรถเข็น (ไฮดรอลิก พวงมาลัย ระบบทำความร้อน ฯลฯ) หากรถเข็นผ่านใต้ลูกศร การเบรกแบบรีโอสแตติก.
ไดรฟ์เกือบทั้งหมดของรถเข็นประกอบด้วยหลายส่วน:
-
สำเนาคู่;
-
เบรกเกอร์;
-
หน่วยควบคุม IGBT;
-
รูปแบบการกำกับดูแล
-
ตัวควบคุมการเคลื่อนที่และเบรก
-
บล็อกของรีโอสแตท;
-
ทำให้หายใจไม่ออกเพื่อระงับการรบกวน
-
คอมพิวเตอร์พาเนลหรือโมดูลสวิตช์เพื่อเชื่อมต่อกับคอมพิวเตอร์ภายนอก
ด้วยความช่วยเหลือของแผงควบคุมหรือคอมพิวเตอร์ภายนอกจะทำการวินิจฉัยมอเตอร์ฉุดของรถเข็น, พารามิเตอร์ของการทำงานได้รับการตรวจสอบ, การตั้งค่าจะเปลี่ยนไปหากจำเป็น ตัวควบคุมไมโครโปรเซสเซอร์… พารามิเตอร์การทำงานทั้งหมดและสถานะปัจจุบันของไดรฟ์ลากจะถูกเก็บไว้ ดิจิทัล.
ต่อไปนี้เป็นระบบควบคุมบางรุ่น หลังกระแสไฟรั่ว และมีระบบป้องกันที่เหมาะสม - ตัดการเชื่อมต่อจากเครือข่ายโดยอัตโนมัติ หรืออาจปรากฏที่นี่ก็ได้ เคาน์เตอร์ของพลังงานที่ใช้ในการเคลื่อนไหวและการกู้คืนระหว่างการหยุด
เป็นมูลค่าการกล่าวขวัญแยกต่างหาก อุปกรณ์อิเล็กทรอนิกส์ป้องกันรถเข็นซึ่งทำหน้าที่ปรับปรุงความปลอดภัยของผู้โดยสาร ตัวอย่างเช่น รถรางจะไม่เคลื่อนที่เมื่อประตูผู้โดยสารเปิดอยู่หรือไม่มีอากาศในระบบเบรก