วงจรรีเลย์แบบต่างๆ
ระบบรีเลย์ครองตำแหน่งที่โดดเด่นในบรรดาอุปกรณ์ควบคุมอัตโนมัติจำนวนมาก คุณลักษณะเฉพาะของพวกเขาคือการเปลี่ยนแปลงอย่างรวดเร็วในค่าควบคุม (เอาต์พุต) เมื่อค่าอินพุตเปลี่ยนแปลง กล่าวอีกนัยหนึ่ง แต่ละองค์ประกอบของระบบรีเลย์สามารถสันนิษฐานได้เพียงสองสถานะ: «เปิด» หรือ «ปิด» โดยทั่วไปและทั่วไปคือวงจรรีเลย์ประกอบด้วย ติดต่อองค์ประกอบแม่เหล็กไฟฟ้า (รีเลย์).
โดยลักษณะการทำงาน ระบบรีเลย์จะแบ่งออกเป็นรอบเดียวและหลายรอบ
ในระบบ single-loop สถานะของไดรฟ์จะถูกกำหนดโดยสถานะขององค์ประกอบที่รับได้ตลอดเวลา ไม่มีลำดับที่ชัดเจนในการกระทำของพวกเขา ดังนั้นจึงไม่จำเป็นต้องมีองค์ประกอบขั้นกลาง กล่าวอีกนัยหนึ่ง ในระบบ single-loop การรวมกันของสัญญาณอินพุต (อาร์กิวเมนต์) ที่แน่นอนจะสอดคล้องกับค่าที่แน่นอนของปริมาณเอาต์พุต (ฟังก์ชัน) เมื่ออธิบายโครงร่างของระบบดังกล่าว ไม่สามารถใช้แนวคิด «ก่อน» «หลัง» «ลาก่อน» ฯลฯ ซึ่งเป็นลักษณะลำดับของการป้อนอาร์กิวเมนต์
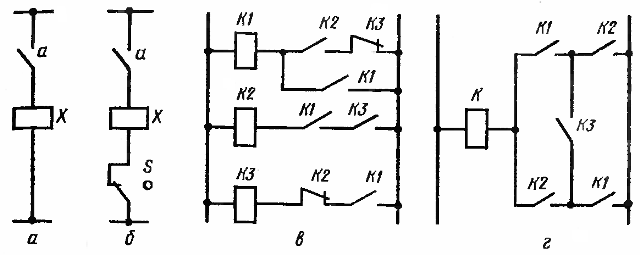
ข้าว. 1.ความหลากหลายของวงจรรีเลย์: a - รอบเดียว, b - หลายรอบ, c - ประเภท P, d - ประเภท H
ตัวอย่างเช่น ในวงจรเดียวที่แสดงในรูปที่ 1 a การทำงานของแอคชูเอเตอร์ X จะขึ้นอยู่กับการกระทำขององค์ประกอบรับเท่านั้น — หน้าสัมผัสปิด a ไม่มีองค์ประกอบระดับกลางที่นี่
ในระบบหลายวงจรมีลำดับที่แน่นอนในการทำงานขององค์ประกอบการรับและการบริหารสำหรับการใช้งานซึ่งจำเป็นต้องมีองค์ประกอบระดับกลาง ดังนั้น ฟังก์ชันต่างๆ สามารถจับคู่อาร์กิวเมนต์ของชุดค่าผสมเดียวกันได้ แต่อิงตามข้อมูล ณ เวลาต่างๆ กัน
ดังนั้นในวงจรของรูปที่ 1, b การกระทำของแอคชูเอเตอร์ X จะถูกกำหนดโดยการกระทำขององค์ประกอบรับ - หน้าสัมผัสปิด a แต่ยังโดยองค์ประกอบกลาง S
รูปภาพของไดอะแกรมของระบบรีเลย์ซึ่งแสดงจำนวนและองค์ประกอบขององค์ประกอบโครงสร้าง ตลอดจนการกำหนดค่าการเชื่อมต่อระหว่างองค์ประกอบต่างๆ เรียกว่า โครงสร้างวงจรรีเลย์ ส่วนของวงจรรีเลย์ที่มีหน้าสัมผัสเท่านั้นเรียกว่าวงจรหน้าสัมผัส
ส่วนใหญ่แล้วโครงสร้างของวงจรรีเลย์จะแสดงเป็นภาพกราฟิกในรูปแบบของสัญลักษณ์ขององค์ประกอบและการเชื่อมต่อ แต่ละองค์ประกอบกราฟิกของวงจรได้รับการกำหนดตัวอักษร
ตาม GOST ขดลวดของหน้าสัมผัส, ตัวเริ่มต้นแม่เหล็ก, รีเลย์ถูกกำหนดโดยตัวอักษร K หากมีองค์ประกอบหลายอย่างในวงจรจะมีการเพิ่มหมายเลขที่ตรงกับหมายเลขซีเรียลขององค์ประกอบในแผนภาพในการกำหนดตัวอักษร คุณสามารถใช้การกำหนดตัวอักษรสองตัวได้: ตัวอย่างเช่น คอยล์ของคอนแทคเตอร์, สตาร์ทแม่เหล็กถูกกำหนดเป็น KM, รีเลย์เวลา KT, รีเลย์แรงดันไฟฟ้า KV, รีเลย์ปัจจุบัน KA เป็นต้นหน้าสัมผัสขององค์ประกอบมีการกำหนดเช่นเดียวกับขดลวด ตัวอย่างเช่น K4 เป็นรีเลย์ตัวที่สี่และหน้าสัมผัสทั้งหมดของรีเลย์นี้จะมีการกำหนดเหมือนกัน
ตามประเภทของการเชื่อมต่อมีวงจรอนุกรมแบบขนาน (ประเภท P) และการเชื่อมต่อแบบบริดจ์ (ประเภท H) ในวงจรประเภท P (รูปที่ 1, c) หน้าสัมผัสและขดลวดขององค์ประกอบต่าง ๆ จะเชื่อมต่อแบบอนุกรมซึ่งกันและกันและแต่ละวงจรขนานกัน ในวงจรประเภท H (รูปที่ 1, d) การมีส่วนประกอบของสะพาน (องค์ประกอบลัดวงจร) ทำให้เกิดการเชื่อมต่อแบบอนุกรมและแบบขนานพร้อมกันในวงจรต่างๆ วงจรบริดจ์มีหน้าสัมผัสน้อยกว่าวงจรประเภท P

เมื่อศึกษาระบบรีเลย์อัตโนมัติ พวกเขาแก้ปัญหาสองประการเป็นหลัก:
-
อย่างแรกคือการวิเคราะห์วงจรรีเลย์นั่นคือการกำหนดเงื่อนไขการทำงานของรีเลย์แต่ละตัวและลำดับของการกระทำ
-
ประการที่สอง - การสังเคราะห์โครงร่างนั่นคือการค้นหาโครงสร้างของวงจรตามเงื่อนไขการทำงานที่กำหนด
การวิเคราะห์และการสังเคราะห์ทำให้สามารถรับไดอะแกรมไฟฟ้าของระบบโดยมีจำนวนรีเลย์และหน้าสัมผัสน้อยที่สุด เมื่อศึกษาสถานะคงที่ขององค์ประกอบแต่ละส่วนของระบบรีเลย์อัตโนมัติโดยไม่คำนึงถึงพฤติกรรมเมื่อเวลาผ่านไป มีการใช้เครื่องมือทางคณิตศาสตร์พิเศษกันอย่างแพร่หลาย - สิ่งที่เรียกว่า พีชคณิตของตรรกะ.