เครื่องขยายสัญญาณแม่เหล็กในเครื่องตัดโลหะ
แอมพลิฟายเออร์แม่เหล็กจะสลับวงจรไฟฟ้าโดยการเปลี่ยนความต้านทานไฟฟ้าอุปนัยภายในขอบเขตที่กว้าง ซึ่งค่าที่ขึ้นอยู่กับระดับความอิ่มตัวของวงจรแม่เหล็ก
แอมพลิฟายเออร์แม่เหล็กใช้กันอย่างแพร่หลายในไดรฟ์ไฟฟ้าของเครื่องตัดโลหะเนื่องจากความน่าเชื่อถือและอายุการใช้งานที่ยาวนาน (ถือว่าเป็นหนึ่งในองค์ประกอบที่เชื่อถือได้มากที่สุดของระบบอัตโนมัติ) การไม่มีชิ้นส่วนที่เคลื่อนไหว ความเป็นไปได้ในการแสดงแม่เหล็ก แอมพลิฟายเออร์ที่มีกำลังวัตต์เป็นเศษส่วนถึงหลายร้อยกิโลวัตต์ มีความแข็งแรงและทนทานสูงในแง่ของแรงสั่นสะเทือนและแรงกระแทก นอกจากนี้ ต้องขอบคุณแอมพลิฟายเออร์แม่เหล็ก จึงสามารถรวมสัญญาณได้อย่างง่ายดาย พวกเขามีกำไรสูง ในเครื่องขยายสัญญาณแบบแม่เหล็ก ไม่มีการเชื่อมต่อทางไฟฟ้าระหว่างวงจรอินพุตและเอาท์พุต
หลักการทำงานของแอมพลิฟายเออร์แม่เหล็กนั้นขึ้นอยู่กับการใช้ความไม่เชิงเส้นของเส้นโค้งการสะกดจิตของวัสดุเฟอร์โรแมกเนติกเมื่อ DC เป็นแม่เหล็ก แกนของแอมพลิฟายเออร์จะอิ่มตัวและค่าความเหนี่ยวนำของขดลวด AC ที่ทำงานของแอมพลิฟายเออร์จะลดลง ขดลวดปฏิบัติการมักจะต่ออนุกรมกับโหลด ดังนั้นแรงดันไฟฟ้าที่ใช้กับขดลวดการทำงานของเครื่องขยายเสียงในขณะที่อิ่มตัวก่อนที่แกนอิ่มตัวจะถูกนำไปใช้กับโหลด
กระแสโหลดถูกควบคุมโดยการเปลี่ยนแปลงกระแสในขดลวดไบอัสของแอมพลิฟายเออร์แม่เหล็ก ไบอัสคอยล์ถูกใช้เพื่อสร้างไบอัสเริ่มต้นที่จำเป็นในการเปลี่ยนกระแสในโหลดในรูปแบบต่างๆ ขึ้นอยู่กับสัญญาณของขั้วของสัญญาณควบคุม เช่นเดียวกับการเลือกจุดบนส่วนเส้นตรงของคุณลักษณะ ขดลวดป้อนกลับได้รับการออกแบบมาเพื่อให้ได้รูปร่างที่ต้องการของลักษณะเอาต์พุต
โครงสร้าง แอมพลิฟายเออร์แม่เหล็กเป็นแกนที่ทำจากวัสดุเฟอร์โรแมกเนติกแบบแผ่นซึ่งพันขดลวด AC และ DC เพื่อขจัดสัญญาณรบกวน เช่น เป็นต้น ค. วงจรไฟฟ้ากระแสสลับของขดลวดไฟฟ้ากระแสตรง ขดลวดไฟฟ้ากระแสสลับจะพันแยกกันที่แกนกลางและขดลวดไฟฟ้ากระแสตรงจะหุ้มทั้งสองแกน
รูปแบบของเครื่องขยายเสียงแม่เหล็กที่ง่ายที่สุด
แอมพลิฟายเออร์แม่เหล็กอาจมีคอยล์ควบคุมหลายตัว ในกรณีนี้ ในโหมดการทำงาน กระแสในโหลดจะถูกกำหนดโดยกระแสควบคุมทั้งหมด นั่นคือสามารถใช้เป็นส่วนเสริมของสัญญาณไฟฟ้าที่ไม่เกี่ยวข้อง (รวมสัญญาณถาวร)
แอมพลิฟายเออร์แม่เหล็กสามารถกลับด้านและกลับด้านได้ ในแอมพลิฟายเออร์แม่เหล็กแบบผันกลับไม่ได้ การเปลี่ยนแปลงขั้วของสัญญาณควบคุมจะไม่ทำให้เกิดการเปลี่ยนแปลงในเฟสและสัญญาณของกระแสโหลด
แกนของแอมพลิฟายเออร์แม่เหล็กทำจากทั้งเหล็กหม้อแปลงและเพอร์มาลอยด์ และเหล็กหม้อแปลงจะใช้เมื่อกำลังของแอมพลิฟายเออร์แม่เหล็กมากกว่า 1 W ขนาดของการเหนี่ยวนำแม่เหล็กในแกนเหล็กของหม้อแปลงถึง 0.8 — 1 . 0 ต. ปัจจัยการขยายของแอมพลิฟายเออร์แม่เหล็กดังกล่าวแตกต่างกันไปตั้งแต่ 10 ถึง 1,000
Permalloy ใช้ในเครื่องขยายสัญญาณแม่เหล็กที่มีกำลังไฟน้อยกว่า 1 V. อักขระสี่เหลี่ยม ฮิสเทรีซิสลูป สำหรับ permaloy ช่วยให้ได้รับผลกำไรจาก 1,000 ถึง 10,000 และมากกว่านั้น
แกนของแอมพลิฟายเออร์แม่เหล็กถูกโหลดจากแผ่นแยกต่างหาก เช่น แกนของโช้กหรือหม้อแปลง แอมพลิฟายเออร์แม่เหล็กที่ใช้แกน Toroidal ได้รับการกระจายอย่างกว้างขวาง ซึ่งแม้จะมีปัญหาทางเทคโนโลยีในการผลิต แต่ก็มีข้อดีหลายอย่าง ประการแรก ซึ่งก็คือการไม่มีช่องว่างอากาศ ซึ่งช่วยปรับปรุงลักษณะของแอมพลิฟายเออร์แม่เหล็ก
รูปแบบของแอมพลิฟายเออร์แม่เหล็กต่อไปนี้แพร่หลาย: แบบเดี่ยวและแบบพุช, แบบย้อนกลับและแบบกลับไม่ได้, เฟสเดียวและหลายเฟส
ในเครื่องตัดโลหะ (และไม่ใช่เฉพาะเครื่องตัดโลหะ) คุณสามารถค้นหาแอมพลิฟายเออร์แม่เหล็กได้หลากหลายแบบ: ซีรีส์ UM-1P เฟสเดียว, ซีรีส์ UM-ZP สามเฟสที่ประกอบบนแกนรูปตัวยูหกตัวที่ทำขึ้น ของเหล็ก E310, ซีรีส์ TUM เฟสเดียวบนแกน Toroidal, ตัวขยายสัญญาณแบบแม่เหล็กแบบบล็อกของซีรีส์ BD, ประกอบด้วยตัวขยายสัญญาณแบบแม่เหล็ก, หม้อแปลงสเต็ปดาวน์, ไดโอดและตัวต้านทานที่ประกอบกันบนแผงเดียว ระบบขับเคลื่อนไฟฟ้าสามารถสร้างขึ้นได้จากแอมพลิฟายเออร์ในซีรีส์นี้
วงจรขดลวดของเครื่องขยายสัญญาณแม่เหล็ก UM-1P
นอกจากนี้ ไดรฟ์แบบสมบูรณ์ที่มีแอมพลิฟายเออร์แม่เหล็กและมอเตอร์กระแสตรงมักจะใช้กับเครื่องตัดโลหะต่างๆ เช่น ไดรฟ์ทั่วไปที่มีแอมพลิฟายเออร์แม่เหล็ก PMU แต่เราจะพูดถึงเรื่องนี้ในครั้งต่อไปอย่างแน่นอน นอกจากนี้ในโพสต์ถัดไปเราจะมุ่งเน้นไปที่วิธีการปรับแต่งแอมพลิฟายเออร์แม่เหล็กและสัมผัสกับประเด็นอื่น ๆ ที่น่าสนใจสำหรับทุกคนที่พบเจอหรือจะพบในอนาคตเมื่อทำงานกับแอมพลิฟายเออร์แม่เหล็ก
ไดรฟ์ไฟฟ้าเต็มรูปแบบพร้อมแอมพลิฟายเออร์แม่เหล็ก
แม้ว่าตัวแปลงแบบคงที่ (ไทริสเตอร์, ทรานซิสเตอร์กำลัง, โมดูล IGBT) ในโรงงานอุตสาหกรรมของเรา เป็นเรื่องปกติมากที่จะเห็นมอเตอร์ไฟฟ้าและเครื่องกำเนิดไฟฟ้ากระแสตรงทำงานร่วมกับเครื่องขยายสัญญาณแม่เหล็ก
แอมพลิฟายเออร์แม่เหล็กถูกนำมาใช้กันอย่างแพร่หลายในอุปกรณ์อุตสาหกรรมในปี 1950 โดยทั่วไปในยุคของเทคโนโลยีเซมิคอนดักเตอร์มีแนวโน้มดังต่อไปนี้ - ไดรฟ์แบบอะซิงโครนัสและซิงโครนัส (สำหรับพลังงานสูง) ใช้ในไดรฟ์ไฟฟ้าและอุปกรณ์ DC ที่ไม่ได้ควบคุมด้วยไฟฟ้าหรือแบบคงที่ (thyrotron หรือตัวเรียงกระแสปรอท, เครื่องขยายเสียงแม่เหล็ก) สำหรับ ควบคุม
ปัจจุบันส่วนใหญ่มักจะอยู่ในองค์กรในประเทศในรูปแบบของอุปกรณ์ไฟฟ้าของเครื่องตัดโลหะ เครื่องจักร และการติดตั้ง คุณสามารถหาไดรฟ์ไฟฟ้ากระแสตรงที่สมบูรณ์พร้อมเครื่องขยายสัญญาณแม่เหล็กของซีรีส์ PMU
PMU — ขับเคลื่อนด้วยเครื่องขยายสัญญาณแม่เหล็กและวงจรเรียงกระแสซีลีเนียม ช่วงการปรับความเร็วมอเตอร์คือ 10: 1 การปรับทำได้โดยการเปลี่ยนแรงดันกระดองจากความเร็วมอเตอร์ที่กำหนดระบบควบคุมอัตโนมัติพร้อมข้อเสนอแนะทางอิเล็กทรอนิกส์ d s เครื่องยนต์โดยไม่มีตัวสร้างความเร็วรอบและตัวขยายสัญญาณระดับกลาง กำลังขับตั้งแต่ 0.1 ถึง 2 กิโลวัตต์ ไดรฟ์ได้รับการออกแบบมาสำหรับแรงดันเอาต์พุตบริดจ์ที่แก้ไขแล้วที่ 340 ถึง 380 V เพื่อให้ได้ลักษณะของไดรฟ์ที่แข็งเพียงพอ กระแสไฟลบและแรงดันป้อนกลับจะถูกนำเข้าสู่วงจร
ชุดขับ PMU แต่ละชุดประกอบด้วยชุดจ่ายไฟ วงจรเรียงกระแส เครื่องขยายสัญญาณแม่เหล็ก มอเตอร์ไฟฟ้ากระแสตรง และตัวควบคุมความเร็ว
ไดรฟ์ทำงานดังนี้ แรงดันไฟฟ้าที่ใช้กับมอเตอร์จะตามสัญญาณโดยอัตโนมัติขึ้นอยู่กับการเปลี่ยนแปลงของความเร็ว เมื่อความเร็วรอบเครื่องยนต์ลดลง แรงดันไฟฟ้าจะเพิ่มขึ้นและในทางกลับกัน แรงดันไฟฟ้าจะรักษาค่าความเร็วด้วยความแม่นยำที่กำหนด โดยไม่คำนึงถึงการเปลี่ยนแปลงโหลดและปัจจัยรบกวนอื่นๆ
อิทธิพลของปัจจัยรบกวนต่าง ๆ ที่มีต่อความเร็วของการหมุนจะชดเชยปฏิกิริยาของขดลวดทำงานของแอมพลิฟายเออร์แม่เหล็ก: เมื่อโหลดเพิ่มขึ้นกระแสในกระดองจะเพิ่มขึ้นซึ่งทำให้ความต้านทานของขดลวดทำงานลดลง เครื่องขยายเสียงแม่เหล็ก เนื่องจากการลดลงของความต้านทานของขดลวดทำงาน, แรงดันไฟฟ้าในกระดองมอเตอร์เพิ่มขึ้น, กระแสในขดลวดเพิ่มขึ้น, ซึ่งจะช่วยลดความต้านทานของขดลวดของเครื่องขยายเสียงทำงานต่อไป อันเป็นผลมาจากความต้านทานทั่วไปลดลง ของขดลวดทำงาน แรงดันไฟฟ้าในกระดองมอเตอร์เพิ่มขึ้น ซึ่งชดเชยการลดความเร็วของเครื่องยนต์ ความเร็วมอเตอร์ที่ต้องการถูกกำหนดโดยใช้จุดตั้งค่า P และตัวต้านทาน R1 — R4
PMU-M นั้นคล้ายกับซีรีส์ PMU แต่แอมพลิฟายเออร์แม่เหล็กประกอบอยู่บนแกนรูปตัวยู กำลังขับ PMU-M ตั้งแต่ 0.1 ถึง 7 กิโลวัตต์
อุปกรณ์ PMU-M
ไดรฟ์ซีรีย์ PMU-M ใช้ระบบควบคุมความเร็วอัตโนมัติพร้อมแรงดันกระดองมอเตอร์และกระแสตอบรับ เครื่องขยายสัญญาณแม่เหล็กมีขดลวดควบคุมสองชุด กระแสควบคุมไหลผ่านหนึ่งในนั้นซึ่งเป็นผลรวมเชิงพีชคณิตของกระแสเซ็ตพอยต์และกระแสป้อนกลับและอีกอันหนึ่ง (ขดลวดอคติ) ทำหน้าที่เลือกจุดปฏิบัติการของส่วนตรงของคุณลักษณะของแอมพลิฟายเออร์แม่เหล็ก
เพื่อป้องกันค่ากระแสอาร์มาเจอร์ที่สูงจนยอมรับไม่ได้ ไดร์ฟ PMU-M ขนาด 8 ถึง 11 จึงติดตั้งตัวจำกัดกระแส เมื่อกระแสกระดองเกินค่าที่อนุญาต รีเลย์กระแสเกินจะเปิดใช้งาน หน้าสัมผัสเปิดจะเปิดขึ้นและขัดจังหวะวงจรจ่ายของคอยล์ควบคุม เมื่อขดลวดอคติยังคงปิดอยู่ แอมพลิฟายเออร์แม่เหล็กจะถูกยกเลิกพลังงานและกระแสกระดองจะลดลง การทำงานของวงจรขับ PMU-M นั้นคล้ายกับการทำงานของวงจรขับ PMU
PMU -P — ขับเคลื่อนด้วยความแม่นยำที่เพิ่มขึ้นและช่วงการควบคุมที่เพิ่มขึ้น 100: 1 ระบบควบคุมอัตโนมัติพร้อมข้อเสนอแนะสำหรับความถี่ในการหมุนซึ่งดำเนินการโดยใช้เครื่องสร้างความเร็วรอบและเครื่องขยายสัญญาณเซมิคอนดักเตอร์ระดับกลาง ความเร็วของมอเตอร์ถูกปรับโดยการปรับแรงดันไฟฟ้ากระดอง
อย่างไรก็ตาม แอมพลิฟายเออร์แม่เหล็กยังสามารถใช้เพื่อควบคุมแรงดันไฟฟ้าที่ขั้วของมอเตอร์แบบอะซิงโครนัส เช่นเดียวกับสตาร์ทเตอร์แบบไร้สัมผัส
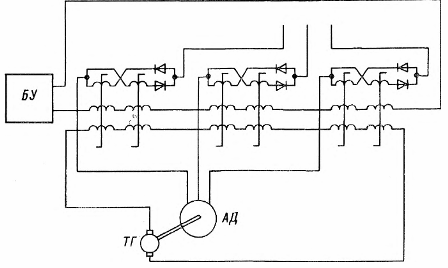
ระบบมอเตอร์เหนี่ยวนำเครื่องขยายสัญญาณแม่เหล็ก