อุปกรณ์ควบคุมความเร็วรอบเครื่องยนต์
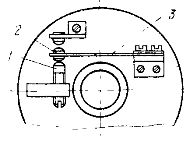
มอเตอร์ไฟฟ้าแบบอะซิงโครนัสใช้กันอย่างแพร่หลายในวงจรเบรกแบบทวนกระแส รีเลย์ควบคุมความเร็วเหนี่ยวนำ... เพลาอินพุตของรีเลย์ 5 ซึ่งติดตั้งแม่เหล็กถาวรทรงกระบอก 4 เชื่อมต่อกับเพลาของมอเตอร์ไฟฟ้าซึ่งจะต้องควบคุมความเร็วเชิงมุม
เมื่อมอเตอร์ไฟฟ้าหมุน สนามแม่เหล็กจะข้ามสายไฟของการลัดวงจร 3 ของสเตเตอร์แบบหมุน 6 EMF จะถูกเหนี่ยวนำในขดลวด ซึ่งค่าที่ได้จะเป็นสัดส่วนกับความเร็วเชิงมุมของการหมุนของเพลา ภายใต้อิทธิพลของมัน กระแสจะปรากฏในขดลวดและเกิดแรงปฏิสัมพันธ์ซึ่งมีแนวโน้มที่จะหมุนสเตเตอร์ 6 ในทิศทางการหมุนของแม่เหล็ก
ที่ความเร็วการหมุนระดับหนึ่ง แรงจะเพิ่มขึ้นมากจนลิมิตเตอร์ 2 เอาชนะความต้านทานของสปริงแบบแบน สลับหน้าสัมผัสรีเลย์ รีเลย์มีโหนดสัมผัสสองโหนด: 1 และ 7 ซึ่งจะเปลี่ยนไปตามทิศทางการหมุน
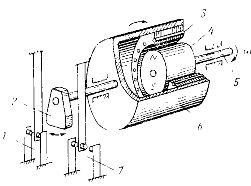
รูปที่ 1. รีเลย์ควบคุมความเร็วแบบเหนี่ยวนำ
รีเลย์ควบคุมความเร็วแบบเหนี่ยวนำมีการออกแบบที่ค่อนข้างซับซ้อนและมีความแม่นยำต่ำซึ่งเป็นที่ยอมรับได้สำหรับระบบควบคุมแบบหยาบเท่านั้น ความแม่นยำในการควบคุมความเร็วที่สูงขึ้นสามารถทำได้โดยใช้เครื่องสร้างความเร็วรอบ — เครื่องวัดขนาดจิ๋ว แรงดันไฟฟ้าที่ขั้วไฟฟ้าจะแปรผันโดยตรงกับความเร็วของการหมุน
เครื่องกำเนิดไฟฟ้า Tacho ถูกใช้ในระบบป้อนกลับของไดรฟ์แบบปรับความเร็วได้ซึ่งมีช่วงรอบต่อนาทีที่กว้าง ดังนั้นจึงมีข้อผิดพลาดเพียงไม่กี่เปอร์เซ็นต์ ที่พบมากที่สุดคือ DC tachogenerators
ในรูป 2 แสดงไดอะแกรมของรีเลย์ควบคุมความเร็วสำหรับมอเตอร์ไฟฟ้า M โดยใช้เครื่องกำเนิดความเร็วรอบ G วงจรกระดองซึ่งประกอบด้วยรีเลย์แม่เหล็กไฟฟ้า K และรีโอสแตตควบคุม R เมื่อแรงดันไฟฟ้าที่ขั้วกระดองของเครื่องกำเนิดความเร็วรอบเกินแรงดันไฟฟ้าที่ใช้งาน รีเลย์เปิดอยู่ในวงจรภายนอก
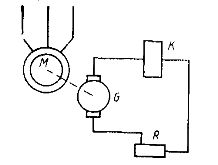
รูปที่ 2 รีเลย์ควบคุมความเร็วพร้อมตัวสร้างความเร็วรอบ
 รูปที่ 3 แผนผังของสะพานวัดความเร็วรอบ
รูปที่ 3 แผนผังของสะพานวัดความเร็วรอบ
เมื่อความต้านทานของวงจรกระดองเพิ่มขึ้น ความแม่นยำของวงจรก็จะเพิ่มขึ้น ดังนั้นบางครั้งรีเลย์จึงเชื่อมต่อกับเครื่องกำเนิดความเร็วรอบผ่านแอมพลิฟายเออร์เซมิคอนดักเตอร์ระดับกลาง นอกจากนี้ยังเป็นไปได้ที่จะใช้ส่วนประกอบธรณีประตูแบบไม่สัมผัสของเซมิคอนดักเตอร์ที่มีแรงดันตอบสนองที่เสถียรเพื่อจุดประสงค์นี้
ความน่าเชื่อถือของวงจรสามารถปรับปรุงได้หากเครื่องกำเนิดความเร็วรอบ DC ถูกแทนที่ด้วยเครื่องสร้างความเร็วรอบแบบอะซิงโครนัสแบบไร้สัมผัส
เครื่องสร้างความเร็วรอบแบบอะซิงโครนัสมีโรเตอร์กลวงที่ไม่ใช่แม่เหล็กซึ่งทำในรูปของแก้ว สเตเตอร์มีสองขดลวดที่มุม 90 °ซึ่งกันและกัน หนึ่งในขดลวดเชื่อมต่อกับเครือข่ายกระแสสลับแรงดันไฟฟ้าไซน์จะถูกลบออกจากขดลวดอีกด้าน ซึ่งเป็นสัดส่วนกับความเร็วของโรเตอร์ ความถี่ของแรงดันเอาต์พุตจะเท่ากับความถี่ของไฟหลักเสมอ
 ในมอเตอร์ DC Executive สมัยใหม่ เครื่องกำเนิดความเร็วรอบถูกสร้างขึ้นในตัวเรือนเดียวกับเครื่องจักร และติดตั้งบนเพลาเดียวกันกับมอเตอร์หลัก สิ่งนี้ช่วยลดการกระเพื่อมของแรงดันเอาต์พุตและปรับปรุงความแม่นยำของการควบคุมความเร็ว
ในมอเตอร์ DC Executive สมัยใหม่ เครื่องกำเนิดความเร็วรอบถูกสร้างขึ้นในตัวเรือนเดียวกับเครื่องจักร และติดตั้งบนเพลาเดียวกันกับมอเตอร์หลัก สิ่งนี้ช่วยลดการกระเพื่อมของแรงดันเอาต์พุตและปรับปรุงความแม่นยำของการควบคุมความเร็ว
เครื่องกำเนิดความเร็วรอบ DC ชนิด PT-1 พร้อมการกระตุ้นด้วยแม่เหล็กไฟฟ้ามักใช้ในมอเตอร์ไฟฟ้าซีรีส์ PBST แรงบิดสูง มอเตอร์กระแสตรง ฉันมีแม่เหล็กถาวรตื่นเต้น tacho
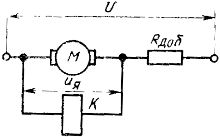
ในกรณีที่มอเตอร์ DC M ไม่มีตัวสร้างความเร็วรอบ สามารถควบคุมความเร็วได้โดยการวัด EMF ของกระดอง สำหรับสิ่งนี้จะใช้วงจรสะพานวัดความเร็วรอบซึ่งประกอบขึ้นด้วยตัวต้านทานสองตัว: R1 และ R2, กระดอง Ri และเสาเพิ่มเติมของเครื่อง Rdp แรงดันขาออกของสะพานวัดความเร็วรอบ Uout = U1 — Udp หรือ
Uout = (Rdp / Rdp + Ri) x E = (Rdp / Rdp + Ri) x cω
ความเท่าเทียมกันสุดท้ายใช้ได้ภายใต้เงื่อนไขที่ว่าฟลักซ์แม่เหล็กของมอเตอร์ไฟฟ้าคงที่ รวมถึงองค์ประกอบเกณฑ์ที่เอาต์พุตของสะพานวัดความเร็วรอบจะได้รับรีเลย์ที่ตั้งค่าเป็นความเร็วเชิงมุมของการหมุน ความแม่นยำของสะพานวัดความเร็วรอบต่ำเนื่องจากความแปรปรวนของความต้านทานการสัมผัสของแปรงถ่านและความไม่สมดุลของความร้อนของความต้านทาน
หากมอเตอร์กระแสตรงทำงานในลักษณะเทียมและมีความต้านทานเพิ่มเติมจำนวนมากรวมอยู่ในอาร์มาเจอร์ ฟังก์ชันรีเลย์ความเร็วสามารถดำเนินการได้โดยใช้รีเลย์แรงดันไฟฟ้าที่เชื่อมต่อกับเทอร์มินอลของอาร์มาเจอร์
แรงดันไฟฟ้าในกระดองของมอเตอร์ไฟฟ้า Uja = E + IjaRja
เนื่องจาก I = (U — E) / (Ri + Rext) เราจึงได้ Ui = (Rext / (Ri + Rext)) x E + (RI / (Ri + Rext)) x U ดังนั้นเทอมที่สองจึงถูกละเลยได้ และสามารถพิจารณาแรงดันไฟฟ้าของขั้วกระดองเป็นสัดส่วนโดยตรงกับแรงเคลื่อนไฟฟ้าและความเร็วรอบของมอเตอร์
รูปที่ 4 การควบคุมความเร็วด้วยรีเลย์แรงดันไฟฟ้า
 รูปที่ 5 รีเลย์ควบคุมความเร็วแบบแรงเหวี่ยง
รูปที่ 5 รีเลย์ควบคุมความเร็วแบบแรงเหวี่ยง
พวกเขามีการออกแบบที่เรียบง่ายมาก สวิตช์ความเร็วแรงเหวี่ยง... พื้นฐานของรีเลย์คือแผ่นหน้าพลาสติก 4 ซึ่งติดตั้งอยู่บนเพลาซึ่งต้องควบคุมความเร็วของการหมุน สปริงแบบแบน 3 ที่มีหน้าสัมผัสเคลื่อนย้ายได้ขนาดใหญ่ 2 และหน้าสัมผัสแบบปรับได้คงที่ 1 ได้รับการแก้ไขบนแผ่นด้านหน้า สปริงทำจากเหล็กพิเศษซึ่งเป็นโมดูลัสของความยืดหยุ่นซึ่งแทบไม่ขึ้นกับการเปลี่ยนแปลงของอุณหภูมิ
เมื่อแผ่นปิดหน้าหมุน แรงเหวี่ยงจะกระทำกับหน้าสัมผัสที่เคลื่อนที่ได้ ซึ่งความเร็วการหมุนระดับหนึ่งจะเอาชนะแรงต้านของสปริงแบนและเปลี่ยนหน้าสัมผัส กระแสจ่ายไปยังอุปกรณ์หน้าสัมผัสผ่านสลิปริงและแปรง ไม่แสดงในรูป รีเลย์ดังกล่าวใช้ในระบบรักษาเสถียรภาพความเร็วสำหรับไมโครมอเตอร์กระแสตรง แม้จะมีความเรียบง่าย แต่ระบบยังคงรักษาความเร็วโดยมีข้อผิดพลาดในการสั่งซื้อ 2%
