วงจรควบคุมมอเตอร์เป็นฟังก์ชันของเวลา
 การควบคุมประเภทนี้จะใช้เมื่อการสลับทั้งหมดในวงจรไฟฟ้าของมอเตอร์ไฟฟ้าเกิดขึ้นในบางช่วงเวลา เช่น เมื่อทำการสตาร์ทมอเตอร์ไฟฟ้าโดยอัตโนมัติโดยไม่ต้องตรวจสอบความเร็วหรือกระแส ระยะเวลาของช่วงเวลาจะถูกกำหนดและสามารถปรับได้โดยการตั้งค่ารีเลย์เวลา
การควบคุมประเภทนี้จะใช้เมื่อการสลับทั้งหมดในวงจรไฟฟ้าของมอเตอร์ไฟฟ้าเกิดขึ้นในบางช่วงเวลา เช่น เมื่อทำการสตาร์ทมอเตอร์ไฟฟ้าโดยอัตโนมัติโดยไม่ต้องตรวจสอบความเร็วหรือกระแส ระยะเวลาของช่วงเวลาจะถูกกำหนดและสามารถปรับได้โดยการตั้งค่ารีเลย์เวลา
การควบคุมเวลาได้รับการแพร่หลายมากที่สุดในอุตสาหกรรมเนื่องจากความเรียบง่ายและความน่าเชื่อถือของรีเลย์เวลาแม่เหล็กไฟฟ้าและอิเล็กทรอนิกส์ที่ผลิตจำนวนมาก
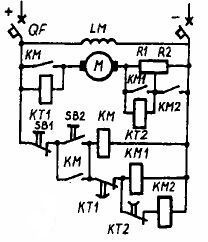
ดังนั้นจากรูปที่ 1, a และ b จะเห็นได้ว่าเมื่อปิดหน้าสัมผัส K ของคอนแทคไลน์ ความต้านทานทั้งหมดของรีโอสแตทจะรวมอยู่ในวงจรกระดอง เท่ากับ R1 + R2 + R3 และการรวมส่วนต้านทานเริ่มต้น สามารถเกิดขึ้นได้ในบางช่วงเวลา t1, t2 และ t3 ที่ความเร็วรอบเครื่องยนต์ที่กำหนด n1, n2, n3 และเมื่อกระแสไหลเข้าลดลงถึงค่าที่ตั้งไว้ I2 มีการเลือกช่วงเวลาเพื่อให้การลัดวงจรของความต้านทานที่ตามมาแต่ละครั้ง กระแสมอเตอร์ไม่เกิน I1 ที่อนุญาต
เมื่อมอเตอร์เร่งความเร็วจาก n = 0 ถึง n1 กระแสจะลดลงเป็น I2 อันเป็นผลมาจากแรงเคลื่อนไฟฟ้าด้านหลังที่เพิ่มขึ้น หลังจากช่วงเวลา t1 ให้ติดต่อ K1 ปิด, แบ่งความต้านทาน R1 ซึ่งนำไปสู่การลดลงของความต้านทานของรีโอสแตทเป็น R2 + R3, การเพิ่มขึ้นของกระแสใหม่เป็น I1 เป็นต้น ในตอนท้ายของการสตาร์ท มอเตอร์จะเร่งความเร็วจนถึงความเร็วที่กำหนด รีโอสแตทเริ่มต้นจะถูกลบออกอย่างสมบูรณ์
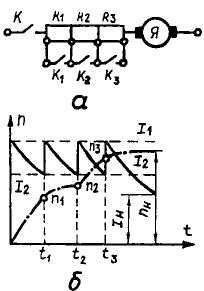
ข้าว. 1. วงจรควบคุมมอเตอร์เป็นฟังก์ชันของเวลา: a — ไดอะแกรมสตาร์ทมอเตอร์ DC, b — ไดอะแกรมสตาร์ท
พิจารณาวงจรควบคุมมอเตอร์เป็นฟังก์ชันของเวลา
ในการควบคุมตามเวลาของมอเตอร์เหนี่ยวนำด้วยโรเตอร์แบบพัน (รูปที่ 2) การหน่วงเวลาที่ต้องใช้ในการลัดวงจรแต่ละขั้นตอนของรีโอสแตตเริ่มต้นนั้นมาจากรีเลย์เวลาแบบลูกตุ้ม ซึ่งจำนวนนั้นเท่ากับจำนวนของ ขั้นตอน รูปแบบการทำงานดังต่อไปนี้
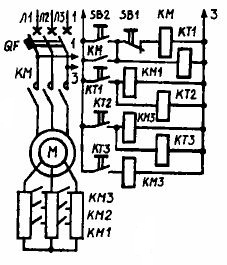
ข้าว. 2. วงจรควบคุมเป็นฟังก์ชันของเวลาของมอเตอร์เหนี่ยวนำแบบแบดโรเตอร์
เมื่อคุณคลิกที่ ปุ่ม SB1 รับพลังงานไปยังคอนแทคคอยล์บนสาย KM ซึ่งเชื่อมต่อมอเตอร์สเตเตอร์กับไฟหลัก ในเวลาเดียวกัน เอาท์พุทรีโอสแตทได้รับการแนะนำอย่างเต็มที่ เมื่อใช้ร่วมกับคอนแทครีเลย์เวลา KT1 จะเปิดขึ้นซึ่งหลังจากช่วงเวลาหนึ่งจะปิดหน้าสัมผัสในวงจรของขดลวดของคอนแทค KM1
คอนแทคเตอร์ทำงานและปิดส่วนแรกของรีโอสแตทเพื่อสตาร์ทโรเตอร์ ในเวลาเดียวกันรีเลย์เวลา KT2 จะเปิดขึ้นซึ่งจะปิดหน้าสัมผัสด้วยการหน่วงเวลาและเปิดคอยล์ KM2 และรีเลย์เวลา KTZ หน้าสัมผัสของคอนแทค KM2 ลัดวงจร KM2 ระยะที่สองของรีโอสแตทเริ่มต้นนอกจากนี้ เมื่อมีการหน่วงเวลา หน้าสัมผัสของรีเลย์ KTZ จะถูกกระตุ้น เปิดขดลวด KMZ ซึ่งทำให้เกิดการลัดวงจรของสเตจสุดท้ายของรีโอสแตทเริ่มต้นของ KMZ และมอเตอร์จะยังคงทำงานต่อไปในอนาคต เช่นเดียวกับ โรเตอร์กระรอก
มอเตอร์จะหยุดโดยกดปุ่ม SB และในกรณีที่โอเวอร์โหลด มอเตอร์จะปิดโดยปล่อยสวิตช์ QF ซึ่งจะเป็นการปิดไลน์คอนแทคเตอร์ หน้าสัมผัสเสริม KM และคอนแทคเร่งความเร็วทั้งหมดและรีเลย์หน่วงเวลาที่ไม่ใช่เวลา โซ่พร้อมสำหรับรอบต่อไป
ในการเริ่มความเร็วรอบเดินเบาของมอเตอร์เหนี่ยวนำด้วยพลังงานที่เพิ่มขึ้นด้วยการสลับสเตเตอร์ที่คดเคี้ยวจากดาวเป็นเดลต้าคุณสามารถใช้ไดอะแกรมในรูปที่ 3. การสลับในวงจรนี้ทำโดยอัตโนมัติตามเวลา เมื่อกดปุ่ม SB2 ขดลวดสเตเตอร์จะเชื่อมต่อกับเครือข่ายโดยคอนแทค KM ในเวลาเดียวกันรีเลย์เวลา KT และคอยล์ KY เชื่อมต่อกับเครือข่ายซึ่งเชื่อมต่อสเตเตอร์ที่คดเคี้ยวกับดาวโดยใช้หน้าสัมผัสสามตัวในวงจรไฟฟ้า
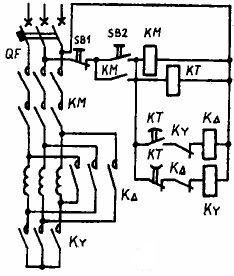
ข้าว. 3. วงจรควบคุมเป็นฟังก์ชันของเวลาของมอเตอร์เหนี่ยวนำ โดยเปลี่ยนจาก Y เป็น Δ
มอเตอร์สตาร์ทและเร่งด้วยแรงดันไฟฟ้าที่ลดลง หลังจากช่วงเวลาที่กำหนดไว้รีเลย์ KT จะปิดคอนแทค KY และเปิดคอยล์ของคอนแทคKΔที่เชื่อมต่อสเตเตอร์ที่คดเคี้ยวกับเดลต้า เนื่องจากมีหน้าสัมผัสเสริม KY ในวงจรของขดลวด K∆ การปิดของคอนแทค K∆ ไม่สามารถเกิดขึ้นก่อนการปิดของคอนแทค KMY
การสตาร์ทมอเตอร์เหนี่ยวนำหลายความเร็วแบบทีละขั้นจะประหยัดกว่าและทำงานตามเวลาลองพิจารณาตัวอย่างการเริ่มต้นทีละขั้นตอนของมอเตอร์สองความเร็วด้วยการม้วนเดียว (รูปที่ 4) ขดลวดสเตเตอร์เปลี่ยนจากเดลต้าเป็นดาวคู่ด้วยความเร็วสองเท่า
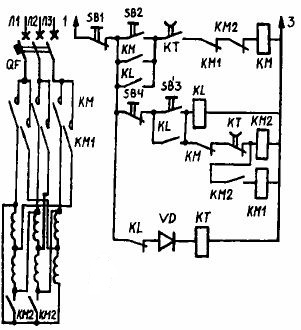
ข้าว. 4. วงจรควบคุมเป็นฟังก์ชันของเวลาสตาร์ทสเต็ปมอเตอร์เหนี่ยวนำ
มอเตอร์เปิดโดยคอนแทค KM ไปที่ระยะความเร็วแรกและโดยคอนแทค KM2 และ KM1 ถึงวินาที ในการเปิดมอเตอร์ด้วยความเร็วแรกให้กดปุ่ม SB2 เพื่อเปิดคอยล์ของคอนแทค KM และกำลังของคอนแทคเตอร์ KM ในวงจรหลัก ขดลวดสเตเตอร์ที่เชื่อมต่อกับเดลต้าเชื่อมต่อกับเครือข่าย คอยล์รีเลย์เวลา KT ถูกกระตุ้นและหน้าสัมผัสปิด (ในวงจรของคอยล์ KM) จะปิด
 การสตาร์ทเครื่องยนต์ทีละขั้นตอนที่ความเร็วรอบที่สองนั้นดำเนินการโดยใช้รีเลย์กลาง K ซึ่งปิดวงจรโดยปุ่มสตาร์ท SB3 หน้าสัมผัสปิด K จะข้ามปุ่มเริ่มต้นทั้งสองปุ่ม และหน้าสัมผัสเปิด K จะยกเลิกการจ่ายพลังงานให้กับรีเลย์เวลา KT หน้าสัมผัสปิด KT ในวงจรของขดลวด KM จะปิดโดยมีการหน่วงเวลาย้อนกลับเนื่องจากขดลวด KM ในช่วงแรกของการเริ่มต้นจะถูกปิดและมอเตอร์จะเปิดที่ความเร็วแรก
การสตาร์ทเครื่องยนต์ทีละขั้นตอนที่ความเร็วรอบที่สองนั้นดำเนินการโดยใช้รีเลย์กลาง K ซึ่งปิดวงจรโดยปุ่มสตาร์ท SB3 หน้าสัมผัสปิด K จะข้ามปุ่มเริ่มต้นทั้งสองปุ่ม และหน้าสัมผัสเปิด K จะยกเลิกการจ่ายพลังงานให้กับรีเลย์เวลา KT หน้าสัมผัสปิด KT ในวงจรของขดลวด KM จะปิดโดยมีการหน่วงเวลาย้อนกลับเนื่องจากขดลวด KM ในช่วงแรกของการเริ่มต้นจะถูกปิดและมอเตอร์จะเปิดที่ความเร็วแรก
หน้าสัมผัสของบล็อก KM ในวงจรของขดลวด KM2 และ KM1 จะเปิดขึ้น ขดลวดเหล่านี้ยังถูกตัดการเชื่อมต่อจากหน้าสัมผัสเปิด KT ซึ่งจะล่าช้าเมื่อส่งคืน หลังจากช่วงระยะเวลาหนึ่ง หน้าสัมผัสปิด KT จะปิดคอยล์ KM และหน้าสัมผัสเปิดจะเปิดคอยล์ของคอนแทคที่ความเร็วรอบที่สองของการหมุน KM1 และ KM2 หน้าสัมผัสหลักของพวกเขาในวงจรจ่ายไฟจะเปลี่ยนสเตเตอร์ที่คดเคี้ยวเป็นดาวคู่และเชื่อมต่อกับแหล่งจ่ายไฟหลัก
ดังนั้นเครื่องยนต์จะเร่งความเร็วไปที่เกียร์หนึ่งก่อนแล้วจึงเปลี่ยนเป็นเกียร์สองโดยอัตโนมัติ โปรดทราบว่าการเชื่อมต่อเบื้องต้นของสเตเตอร์ที่คดเคี้ยวไปยังดาวคู่และการรวมเข้าด้วยกันในเครือข่ายนั้นจะดำเนินการก่อนโดยการเปิดหน้าสัมผัสปิดสองตัวของแหล่งจ่ายไฟ KM2 จากนั้นปิดหน้าสัมผัสหลักสามหน้า KM1 ลำดับการสลับดังกล่าวทำได้โดยความจริงที่ว่าขดลวด KM1 เชื่อมต่อกับแรงดันไฟฟ้าผ่านหน้าสัมผัสของบล็อกปิด KM2 เครื่องยนต์หยุดทำงานโดยกดปุ่ม «หยุด» ซึ่งทำเครื่องหมายบนแผนภาพด้วยตัวอักษร SB1
ในรูป 5 แสดงไดอะแกรมของการสตาร์ทมอเตอร์กระแสตรงแบบกระตุ้นขนานโดยอัตโนมัติตามฟังก์ชันของเวลา เมื่อปิดเบรกเกอร์ QF มอเตอร์จะเตรียมพร้อมสำหรับการสตาร์ท กระแสไหลผ่านวงจรประกอบด้วยขดลวดรีเลย์เวลา KT1, กระดองของมอเตอร์ M และสองขั้นตอนของรีโอสแตทเริ่มต้น R1 + R2
ข้าว. 5. วงจรควบคุมเป็นฟังก์ชันของเวลาของมอเตอร์กระแสตรงแบบกระตุ้น
เนื่องจากความต้านทานสูงของขดลวดของรีเลย์ KT1 กระแสในวงจรนี้จึงมีขนาดเล็กมากและไม่มีผลกระทบต่อมอเตอร์ แต่ตัวรีเลย์จะถูกกระตุ้นและหน้าสัมผัสที่เปิดอยู่ในวงจรของคอนแทค KM1 จะเปิดขึ้น ในขดลวดของรีเลย์เวลาที่สอง KT2 ซึ่งเชื่อมต่อแบบขนานกับความต้านทาน R1 กระแสไฟขนาดเล็กจะถูกแยกออกซึ่งไม่สามารถเปิดได้ ขดลวดสนาม LM ของมอเตอร์ก็เปิดเช่นกัน
มอเตอร์เริ่มต้นโดยการกดปุ่ม SB2 ในเวลาเดียวกันคอนแทค KM และหน้าสัมผัสของมันในวงจรกระดองของมอเตอร์จะเปิดขึ้น กระแสเริ่มต้นขนาดใหญ่ถูกจำกัดโดยรีโอสแตทสองสเตจ R1 และ R2ส่วนหนึ่งของกระแสนี้ถูกแยกไปยังขดลวดของรีเลย์ KT2 และเมื่อสั่งงาน จะเปิดหน้าสัมผัส KT2 ในวงจรคอนแทค KM2 พร้อมกันกับการปิดวงจรกระดอง M หน้าสัมผัสการทำงานของคอนแทค KM จะลัดวงจรขดลวดของรีเลย์ KT1
หลังจากช่วงเวลาหนึ่งเมื่อรีเลย์กลับมา KT1 จะปิดหน้าสัมผัส KT1 ในวงจรคอนแทค KM1 คอนแทคเตอร์นี้ที่มีหน้าสัมผัสการทำงาน KM1 จะลัดวงจร R1 สเตจแรกของรีโอสแตทเริ่มต้นและขดลวดรีเลย์เวลา KT2 ด้วยการหน่วงเวลาส่งคืน หน้าสัมผัสที่ทำงานอยู่ KT2 จะเปิดคอนแทค KM2 ซึ่งด้วยหน้าสัมผัสที่ใช้งานได้ KM2 จะลัดวงจร R2 ขั้นที่สองของรีโอสแตทสตาร์ท เสร็จสิ้นการสตาร์ทเครื่องยนต์
เมื่อกดปุ่ม SB1 คอนแทค KM จะตัดการเชื่อมต่อและตัดการเชื่อมต่อหน้าสัมผัสหลักในวงจรกระดอง กระดองยังคงลุ้น แต่ปรากฎว่ามันเชื่อมต่อแบบอนุกรมกับรีเลย์คอยล์ KT1 เนื่องจากมีกระแสไหลผ่านเล็กน้อย รีเลย์ KT1 จะทำงาน, เปิดหน้าสัมผัสในวงจรของคอนแทค KM1 และ KM2, จะปิดและเปิดหน้าสัมผัส, ความต้านทานไฟฟ้าลัดวงจร R1 และ R2 มอเตอร์จะหยุดทำงาน แต่ขดลวดสนามยังคงเชื่อมต่อกับแหล่งจ่ายไฟหลัก ดังนั้น มอเตอร์จึงเตรียมพร้อมสำหรับการสตาร์ทครั้งต่อไป การดับเครื่องยนต์โดยสมบูรณ์ทำได้โดยการปิดสวิตช์อินพุตอัตโนมัติ BB
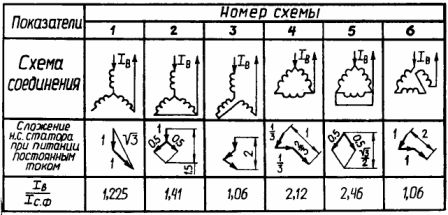
การเบรกแบบไดนามิกของมอเตอร์ยังดำเนินการตามเวลาอีกด้วย สำหรับการเบรกแบบไดนามิก เช่น มอเตอร์เหนี่ยวนำ ขดลวดสเตเตอร์จะถูกตัดการเชื่อมต่อจากเครือข่ายกระแสสลับและตามรูปแบบหนึ่งที่แสดงในตารางที่ 1 จะเชื่อมต่อกับแหล่งจ่ายกระแสตรงในอุตสาหกรรมป่าไม้และงานไม้ ไฟฟ้ากระแสตรงได้มาจากวงจรเรียงกระแสเซมิคอนดักเตอร์แบบพิเศษ ในกรณีนี้ไม่จำเป็นต้องใช้แหล่งกระแสตรงพิเศษ
เมื่อเปิดขดลวดสเตเตอร์ตามรูปแบบใดรูปแบบหนึ่ง (ดูตารางที่ 1) สนามแม่เหล็กที่อยู่กับที่จะถูกสร้างขึ้นในขดลวดไปยังวงจรเรียงกระแส ในสนามที่อยู่นิ่ง โรเตอร์ของมอเตอร์ยังคงหมุนด้วยความเฉื่อย ในกรณีนี้ EMF และกระแสสลับจะถูกสร้างขึ้นในโรเตอร์ของมอเตอร์ ซึ่งจะกระตุ้นสนามแม่เหล็กสลับ สนามแม่เหล็กที่เปลี่ยนแปลงของโรเตอร์เมื่อกระทบกับสนามแม่เหล็กของสเตเตอร์จะสร้างแรงบิดในการเบรก ในกรณีนี้ พลังงานจลน์ที่เก็บไว้จากโรเตอร์และไดรฟ์จะถูกแปลงเป็นพลังงานไฟฟ้าในวงจรโรเตอร์ และเปลี่ยนเป็นความร้อน
พลังงานความร้อนจะกระจายออกจากวงจรโรเตอร์สู่สิ่งแวดล้อม ความร้อนที่เกิดขึ้นในโรเตอร์จะทำให้มอเตอร์ร้อนขึ้น ปริมาณความร้อนที่ปล่อยออกมาขึ้นอยู่กับกระแสในขดลวดสเตเตอร์เมื่อจ่ายกระแสไฟตรง อัตราส่วนของกระแสต่อกระแสเฟสของสเตเตอร์จะแตกต่างกันไปขึ้นอยู่กับโครงร่างที่ใช้เปิดขดลวดสเตเตอร์เมื่อจ่ายกระแสตรง อัตราส่วนของกระแสเหล่านี้สำหรับรูปแบบสวิตชิ่งต่างๆ แสดงอยู่ในตาราง 1
วงจรเบรกแบบไดนามิกของมอเตอร์เหนี่ยวนำแสดงในรูปที่ 6.
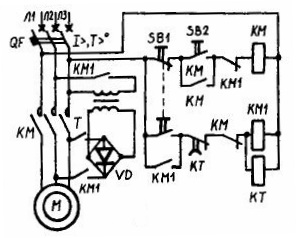
ข้าว. 6. รูปแบบการเบรกแบบไดนามิกของมอเตอร์เหนี่ยวนำ
เมื่อกดปุ่มเริ่มต้น SB1 คอนแทคสาย KM จะเปิดมอเตอร์เป็นเครือข่าย AC หน้าสัมผัสบล็อกปิดจะเปลี่ยนขดลวด KM เป็นแบบขับเคลื่อนด้วยตัวเองหน้าสัมผัสเปิด KM ปลดวงจรจ่ายไฟของคอนแทคเบรก KM1 และรีเลย์เวลา KT เมื่อกดปุ่ม SB คอนแทคสาย KM จะถูกยกเลิกการจ่ายไฟและวงจรคอยล์คอนแทค KM1 จะถูกจ่ายไฟ
คอนแทค KM1 รวมถึงหน้าสัมผัส KM1 ในวงจรของหม้อแปลง T และวงจรเรียงกระแส V ซึ่งเป็นผลมาจากการที่ขดลวดสเตเตอร์จะได้รับกระแสตรง เพื่อป้องกันการสลับอิสระแบบสุ่มของคอนแทคไลน์คอนแทคเปิดของบล็อก KM1 จะเชื่อมต่อแบบอนุกรมกับคอยล์ KM พร้อมกันกับคอนแทคเบรกรีเลย์เวลา KT จะเปิดขึ้นซึ่งได้รับการกำหนดค่าเพื่อให้หน้าสัมผัสเปิดของ KT ปิดคอยล์ KM1 และรีเลย์เวลาหลังจากช่วงเวลาหนึ่ง เลือกการตั้งค่ารีเลย์เวลา KT เพื่อให้เวลาสั่งงานรีเลย์ tkt เท่ากับผลรวมของเวลาหน่วงมอเตอร์ tT และเวลาสะดุด KM1 ของคอนแทคเตอร์ที่ถูกต้อง