วงจรควบคุมมอเตอร์เป็นฟังก์ชันของความเร็ว
 ในการควบคุมมอเตอร์ ความเร็วจะถูกตรวจสอบเป็นฟังก์ชันของความเร็วโรเตอร์ของมอเตอร์ เพื่อส่งผลต่อองค์ประกอบการควบคุมที่สอดคล้องกันเมื่อมีการเปลี่ยนแปลง
ในการควบคุมมอเตอร์ ความเร็วจะถูกตรวจสอบเป็นฟังก์ชันของความเร็วโรเตอร์ของมอเตอร์ เพื่อส่งผลต่อองค์ประกอบการควบคุมที่สอดคล้องกันเมื่อมีการเปลี่ยนแปลง
สามารถใช้รีเลย์ควบคุมความเร็วหรือเครื่องกำเนิดไฟฟ้าขนาดเล็กในวงจรควบคุมการสตาร์ทมอเตอร์ได้ อย่างไรก็ตาม มีการใช้น้อยมากสำหรับวัตถุประสงค์เหล่านี้ เนื่องจากความซับซ้อนของการออกแบบ ต้นทุนสูง และความน่าเชื่อถือไม่เพียงพอ ดังนั้นความเร็วของเครื่องยนต์จึงถูกควบคุมด้วยวิธีทางอ้อม ในมอเตอร์แบบอะซิงโครนัสและซิงโครนัส ความถี่ในการหมุนจะถูกควบคุมโดยแรงเคลื่อนไฟฟ้าและความถี่ของกระแสโรเตอร์ และในมอเตอร์กระแสตรงโดยแรงเคลื่อนไฟฟ้าของกระดอง
ในรูป 1, a และ b แสดงโครงร่างสำหรับการสตาร์ทมอเตอร์กระแสตรงแบบขนานอัตโนมัติโดยขึ้นอยู่กับความถี่ของการหมุนและขึ้นอยู่กับ EMF และแรงดันกระดองจากเวลาที่เริ่มต้น การควบคุมความถี่ในการหมุนนั้นดำเนินการโดยการวัด EMF ของมอเตอร์ ซึ่งจะแปรผันตามสัดส่วนของความถี่ในการหมุน
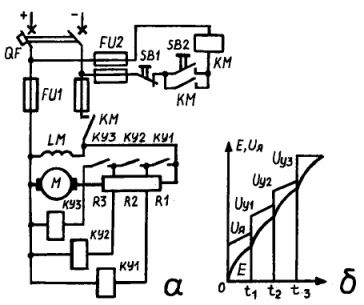
ข้าว. 1.วงจรควบคุมเป็นฟังก์ชันของความเร็ว: a และ b - วงจรและไดอะแกรมเริ่มต้นของมอเตอร์กระแสตรงแบบขนาน
เนื่องจาก EMF เป็นสัดส่วนกับความเร็วของเครื่องยนต์ การป้อนข้อมูลอัตโนมัติในแต่ละขั้นตอนของรีโอสแตทเริ่มต้นจะดำเนินการที่ระดับแรงดันไฟฟ้าที่สั่งงานของคอนแทคเร่ง KM1, KM2 และ KMZ ซึ่งแต่ละอันตั้งค่าไว้ที่การถอยกลับที่แน่นอน ค่า. โดยการกดสตาร์ท ปุ่ม SB2 เปิดคอนแทคสาย KM ความต้านทานทั้งหมด R1, R2, R3 จะต่ออนุกรมกับขดลวดกระดองและจะจำกัดกระแส
ที่ความเร็วหนึ่ง n1 แรงดันไฟฟ้า Uy1 ของขดลวดของคอนแทค K1 คือ

โดยที่นี่คือค่าสัมประสิทธิ์ของเครื่อง
เมื่อ Uy1 จะเท่ากับแรงดันดึงลง คอนแทค KM1 จะทำงานและลัดวงจรความต้านทาน R1 การเพิ่มความเร็วของการหมุนเพิ่มเติมจนกระทั่งการหมุนของ n2 และ n3 จะนำไปสู่การเพิ่มแรงดันไฟฟ้าบนขดลวดของคอนแทค K2 และการลัดวงจรเป็นค่า


ในกรณีนี้คอนแทค K2 และการลัดวงจรจะทำงานแบบอนุกรมและลัดวงจรความต้านทาน R2 และ R3 หลังจากลัดวงจรความต้านทาน R3 แล้ว กระบวนการสตาร์ทจะเสร็จสิ้น และมอเตอร์สามารถทำงานได้เป็นเวลานาน
EMF ในวงจรโรเตอร์ของมอเตอร์เหนี่ยวนำเป็นสัดส่วนกับสลิป เช่น E2s = E2s โดยที่ E2 คือแรงเคลื่อนไฟฟ้าของโรเตอร์ที่อยู่นิ่ง
ยิ่งสลิปต่ำ EMF ยิ่งต่ำ นั่นคือความเร็วของโรเตอร์มอเตอร์จะยิ่งสูงขึ้น ในการควบคุมการสตาร์ทมอเตอร์ AC ด้วยโรเตอร์แบบพัน รีเลย์จะใช้เพื่อควบคุมค่า EMF ในวงจรโรเตอร์อุปกรณ์ที่เกี่ยวข้อง (รีเลย์, คอนแทคเตอร์) ที่ต้านทานการเริ่มลัดวงจรจะถูกปรับตามแรงดันไฟฟ้าเหล่านี้
สำหรับการควบคุมมอเตอร์เหนี่ยวนำของโรเตอร์แบบพันแผลและมอเตอร์แบบซิงโครนัส วิธีความถี่ยังสามารถใช้เป็นฟังก์ชันของความเร็วได้อีกด้วย วิธีนี้ขึ้นอยู่กับการพึ่งพาที่รู้จักของความถี่ของกระแสโรเตอร์ f2 กับความถี่ของการหมุนของสนามสเตเตอร์ n0 และโรเตอร์ n2 เช่น
เนื่องจากความเร็วของโรเตอร์แต่ละตัวสอดคล้องกับค่า f2 ที่กำหนด รีเลย์ที่ตั้งค่าความถี่นั้นและเชื่อมต่อกับวงจรโรเตอร์ของมอเตอร์จะทำหน้าที่กับวงจรคอยล์ของคอนแทค คอนแทคเตอร์จะลัดวงจรระยะความต้านทานด้วยความเร็วที่กำหนด
การเบรกโดยมอเตอร์ตรงข้ามนั้นขึ้นอยู่กับความเร็ว รีเลย์ควบคุมความเร็ว เอส.อาร์. ในรูปที่ 2 a, b แสดงตัวอย่างการหยุดมอเตอร์แบบอะซิงโครนัสโดยฝ่ายค้าน
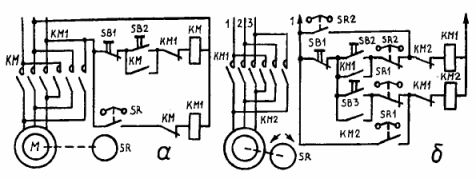
ข้าว. 2. แผนการหยุดมอเตอร์แบบอะซิงโครนัสโดยฝ่ายค้าน: a — ไม่สามารถย้อนกลับได้; ข - ย้อนกลับได้
ลองมาดูกันว่าโครงร่างเหล่านี้ทำงานอย่างไร
การกดปุ่ม SB2 จะเป็นการเปิดขดลวดของคอนแทค KM (ดูรูปที่ 2, a) ซึ่งจะปิดหน้าสัมผัสพลังงานและบล็อกปุ่ม SB2 ในเวลาเดียวกันหน้าสัมผัสของบล็อกเปิด KM ในวงจรของคอยล์ของคอนแทคเบรก KM1 และรีเลย์ควบคุมความเร็ว SR จะตัดการเชื่อมต่อจากเครือข่าย เมื่อโรเตอร์ของมอเตอร์มีความเร็วถึงระดับหนึ่ง หน้าสัมผัส SR จะปิดลง แต่สิ่งนี้จะไม่ทำให้หน้าสัมผัส KM1 ทำงานอีกต่อไป เครื่องยนต์ยังคงทำงานตามปกติ
การหยุดมอเตอร์ด้วยเบรกสลับกลับทำได้โดยการกดปุ่ม SBในเวลาเดียวกันขดลวดของคอนแทค KM จะถูกทำให้เป็นกลางและหน้าสัมผัสหลักจะหายไปและถอดมอเตอร์ออกจากเครือข่าย หน้าสัมผัสการเปิด KM ในวงจรคอนแทคเบรกของ KM1 จะปิด เนื่องจากในขณะนี้หน้าสัมผัสของรีเลย์ควบคุมความเร็ว SR ปิดอยู่ หน้าสัมผัสหลักของคอนแทคเบรกจะเปิดขึ้นทันทีและขดลวดสเตเตอร์จะเปลี่ยนเป็นย้อนกลับ สนามแม่เหล็กจะเริ่มหมุนในทิศทางตรงกันข้าม เช่น การหมุนของโรเตอร์และมอเตอร์จะหยุดโดยการสลับเคาน์เตอร์ ความเร็วของโรเตอร์ลดลงและมีค่าเล็กน้อยที่หน้าสัมผัสของรีเลย์ควบคุมความเร็ว RKS จะเปิดและตัดการเชื่อมต่อมอเตอร์จากไฟหลัก
ในกรณีของการควบคุมย้อนกลับด้วยการเบรกตรงข้าม (รูปที่ 2, b) มอเตอร์จะสตาร์ทไปข้างหน้าโดยกดปุ่ม SB1 ซึ่งโดยการปิดวงจรของขดลวดของคอนแทค KM1 ให้แน่ใจว่ามอเตอร์เชื่อมต่อกับ เครือข่าย โรเตอร์ของมอเตอร์จะเริ่มหมุน และเมื่อถึงความเร็วที่กำหนด หน้าสัมผัสปิด SR1 ของรีเลย์ควบคุมความเร็วจะปิด และหน้าสัมผัสเปิด SR2 จะเปิดขึ้น
การเปิดขดลวดของคอนแทค KM2 จะไม่เกิดขึ้นเนื่องจากหน้าสัมผัสการเปิดของคอนแทค KM1 ทำให้วงจรขาด ในตำแหน่งนี้ มอเตอร์จะทำงานต่อไปจนกว่าจะกดปุ่ม SB เมื่อกดปุ่ม SB วงจรของขดลวด KM1 จะปิด สิ่งนี้จะปิดหน้าสัมผัสเบรก KM1 และวงจรคอยล์ของคอนแทค KM2 จะได้รับพลังงาน
ขดลวดสเตเตอร์ของมอเตอร์จะหมุนกลับ เมื่อโรเตอร์ยังคงหมุนไปในทิศทางเดียวกันด้วยความเฉื่อย การเบรกของฝ่ายค้านจึงเกิดขึ้นเมื่อความเร็วลดลงถึงค่าเล็กน้อยรีเลย์ควบคุมความเร็วจะเปิดหน้าสัมผัส SR1 คอนแทค KM2 จะปิดและตัดการเชื่อมต่อมอเตอร์จากเครือข่าย
ในการสตาร์ทเครื่องยนต์กลับด้าน ให้กดปุ่ม SB2 กระบวนการทั้งหมดจะคล้ายกับที่อธิบายไว้ ตอนนี้บทบาทของคอนแทคเบรกเล่นโดยคอนแทค KM1 และหน้าสัมผัส SR2 ของรีเลย์ควบคุมความเร็วจะควบคุมกระบวนการเบรก
การสตาร์ทมอเตอร์ซิงโครนัสโดยอัตโนมัตินั้นเกี่ยวข้องกับปัญหาที่ทราบกันดี เนื่องจากในกรณีนี้ ไม่จำเป็นต้องจำกัดกระแสเริ่มต้นเท่านั้น แต่ยังต้องซิงโครไนซ์เครื่องกับเครือข่ายด้วย
วงจรควบคุมสำหรับมอเตอร์ซิงโครนัสกำลังต่ำแสดงในรูปที่ 3. ข้อ จำกัด ของกระแสไหลเข้ามีให้โดยความต้านทานที่ใช้งานซึ่งรวมอยู่ในขดลวดสเตเตอร์ ก่อนสตาร์ทเครื่องยนต์ ให้เปิดสวิตช์อินพุตอัตโนมัติ QF และ QF1 ของไฟหลัก AC และ DC ซึ่งให้การป้องกันความร้อนสูงสุด โดยการกดปุ่มเริ่มต้น SB2 ขดลวดของคอนแทค KM จะเปิดขึ้นและขดลวดสเตเตอร์ของมอเตอร์ซิงโครนัสผ่านหน้าสัมผัสหลักของ KM จะเชื่อมต่อกับเครือข่ายผ่านตัวต้านทานเริ่มต้น Rn ขดลวดล็อคตัวเองและหน้าสัมผัสของมันในวงจร DC รวมถึงรีเลย์ล็อค KV, หน้าสัมผัสปิดซึ่ง, ปิด, เตรียมขดลวดของคอนแทค K1 และ K2 สำหรับการเปิด
รีเลย์ความถี่ KF1 และ KF2 ในวงจรกระตุ้นของโรเตอร์ LM ทำงานขึ้นอยู่กับความเร็วของเครื่องยนต์ เมื่อสตาร์ท เมื่อโรเตอร์สลิปมีมากที่สุด หน้าสัมผัสขาดของรีเลย์ KF1 และ KF2 จะเปิดขึ้นการเปิดคอยล์เกิดขึ้นก่อนที่รีเลย์บล็อค KV จะเปิดขึ้น และคอยล์ K1 จะไม่ได้รับพลังงาน หน้าสัมผัสรีเลย์ KF1 และ KF2 จะปิดอีกครั้งเมื่อ RPM ของเครื่องยนต์ถึงประมาณ 60-95% พร้อมกันตามกฎข้อบังคับของรีเลย์
หลังจากปิดหน้าสัมผัสของรีเลย์ KF1 ขดลวดของคอนแทค K1 จะเปิดขึ้น หน้าสัมผัสของมันในวงจรหลักจะลัดวงจรตัวต้านทานเริ่มต้น Rp และสเตเตอร์จะเปิดเป็นแรงดันไฟฟ้าเต็มสาย เมื่อปิดหน้าสัมผัสเปิดของรีเลย์ KF2 วงจรจะถูกสร้างขึ้นเพื่อจ่ายขดลวดของคอนแทค K2 โดยไม่ขึ้นกับคอนแทค K1 หน้าสัมผัสจะเปิดขึ้นที่ความเร็วประมาณ 60% ของความเร็วซิงโครนัส
คอนแทค K2 มีสองขดลวด: หนึ่งหลักดึง KM1 และ KM2 ที่คดเคี้ยวที่สองออกแบบมาเพื่อปลดล็อคซึ่งมีให้พร้อมกับคอนแทค หลังจากเปิดคอยล์รับ KM1 แล้ว หน้าสัมผัสปิด K2 จะปิดในวงจรกระตุ้น และหน้าสัมผัสเปิด K2 จะเปิดขึ้น ปลดขดลวดโรเตอร์ออกจากตัวต้านทานการคายประจุ R1 และ R2 และเชื่อมต่อโรเตอร์กับเครือข่าย DC
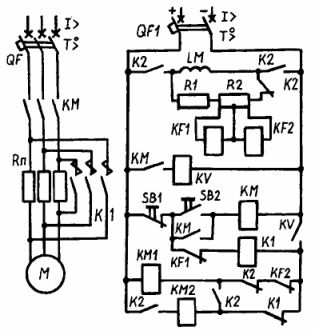
ข้าว. 3. รูปแบบการควบคุมมอเตอร์ซิงโครนัส
หน้าสัมผัสของคอนแทค K2 ทำงานตามลำดับต่อไปนี้ หน้าสัมผัส N / O K2 เปิดขึ้นในวงจรจ่ายไฟของคอยล์ปิ๊กอัพ แต่การปิดกั้นทำให้คอนแทคมีพลังงาน หน้าสัมผัสการปิด K2 จะปิดในวงจรจ่ายไฟของขดลวดทั้งสองและในวงจรของขดลวด KM2 เพื่อเตรียมวงจรสำหรับการเปิดสวิตช์ในภายหลัง คอยล์ K2 จะหยุดทำงานทันทีที่กลไกการล็อคถูกปลดออกจากคอยล์ KM2 มอเตอร์ถูกตัดการเชื่อมต่อจากแหล่งจ่ายไฟหลักโดยกดปุ่ม SB1คอยล์ K1 ปล่อยหน้าสัมผัสการเปิดในวงจรของคอยล์ KM2 ซึ่งจะปลดสลักและปิดคอยล์ KM1 หลังจากนั้นวงจรจะกลับสู่ตำแหน่งเดิม