วิธีที่ใช้งานง่ายในการออกแบบโครงร่างการควบคุม
 วิธีการที่ใช้งานง่าย — วิธีการในการพัฒนารูปแบบการควบคุมตามประสบการณ์ที่ได้รับจากองค์กรออกแบบต่างๆ ในระบบอัตโนมัติของกลไกต่างๆ ขึ้นอยู่กับสัญชาตญาณทางวิศวกรรมของผู้ออกแบบ
วิธีการที่ใช้งานง่าย — วิธีการในการพัฒนารูปแบบการควบคุมตามประสบการณ์ที่ได้รับจากองค์กรออกแบบต่างๆ ในระบบอัตโนมัติของกลไกต่างๆ ขึ้นอยู่กับสัญชาตญาณทางวิศวกรรมของผู้ออกแบบ
มีเพียงผู้เดียวที่ซึมซับประสบการณ์ก่อนหน้านี้ทั้งหมดและมีความสามารถบางอย่างในแง่ของการร่างแบบแผน ผู้ที่สามารถคิดอย่างเป็นนามธรรมและให้เหตุผลอย่างมีเหตุผล จะสามารถใช้วิธีนี้ได้อย่างสมบูรณ์แบบ แม้จะมีความซับซ้อน แต่นักออกแบบไฟฟ้าส่วนใหญ่ใช้วิธีที่ใช้งานง่ายอย่างกว้างขวาง
ตัวอย่างเช่น พิจารณาแผนภาพจลนศาสตร์อย่างง่ายของคันกด (รูปที่ 1) เมื่อล้อ 5 หมุนตามเข็มนาฬิกา คันโยก 4 จะหมุนคันโยก 1 รอบแกน O ด้วยเหตุนี้จึงบังคับคันโยก 3 ด้วยคันโยก 2 เพื่อแปล เมื่อหมุนล้อ 5 ต่อไป ทิศทางการเคลื่อนที่ของคันโยก 1 จะเปลี่ยนไปและรองเท้าจะกลับสู่ตำแหน่งเดิม หลังจากนั้นเครื่องยนต์จะต้องหยุดทำงาน
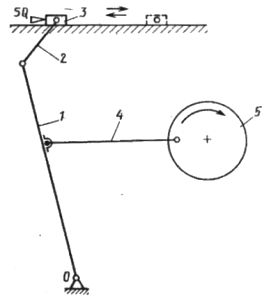
ข้าว. 1. แผนผังของตัวควบคุมดันคันโยก
กลไกการพิจารณาเป็นตัวแทนทั่วไปของอุปกรณ์ผลักดันในรอบแรก กลไกจะเปิดและทำงาน ในการวัดครั้งที่สองจะไม่ทำงาน รอบที่กลไกไม่ทำงานเรียกว่าศูนย์ แม้ว่ารองเท้าจะตอบสนองอย่างเต็มที่ (เดินหน้าและถอยหลัง) ก็สามารถใช้มอเตอร์ไฟฟ้าแบบหมุนกลับไม่ได้เพื่อขับเคลื่อน
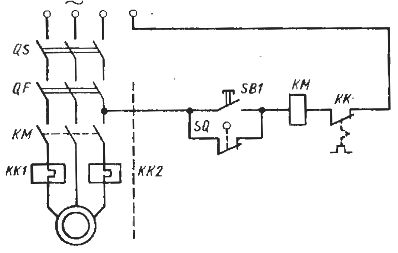
วงจรควบคุมของมอเตอร์ไฟฟ้าลูกสูบคันโยกประกอบด้วยสองส่วน (ในรูปที่ 1 คั่นด้วยเส้นประ): วงจรไฟฟ้าและวงจรควบคุม
พิจารณาวัตถุประสงค์ขององค์ประกอบของวงจรไฟฟ้า กระแสไฟฟ้าสามเฟสจ่ายให้กับสวิตช์ QS ซึ่งจะตัดการจ่ายไฟไปยังมอเตอร์ไฟฟ้าในกรณีที่มีการซ่อมแซมหรือเกิดความเสียหายกับแม่เหล็กสตาร์ทเตอร์ จากนั้นกระแสจะไหลผ่านเบรกเกอร์ที่มีการปลดปล่อย QF แสดงในแผนภาพ ได้รับการออกแบบมาเพื่อป้องกันและถอดแหล่งจ่ายไฟไปยังไดรฟ์ในกรณีที่เกิดกระแสไฟฟ้าลัดวงจร หน้าสัมผัสหลักของแม่เหล็กสตาร์ท KM เปิดหรือปิดขดลวดของมอเตอร์ไฟฟ้า M.
รีเลย์ความร้อน KK1 และ KK2 ซึ่งเป็นองค์ประกอบความร้อนที่แสดงอยู่ในวงจรไฟฟ้าได้รับการออกแบบมาเพื่อป้องกันมอเตอร์ไฟฟ้าจากการโอเวอร์โหลดเป็นเวลานาน:
รูปแบบการควบคุมทำงานดังนี้ เมื่อคุณกดปุ่มเริ่มต้น SB1 ขดลวดของสตาร์ทแม่เหล็ก KM จะถูกกระตุ้น ดังนั้นหน้าสัมผัสของวงจรจ่ายของ KM จะปิดลงและกระแสไฟฟ้าจะเข้าสู่ขดลวดมอเตอร์ โรเตอร์ของมอเตอร์หมุนและดรัมเริ่มเคลื่อนที่ไปข้างหน้า ในขณะเดียวกันก็เคลื่อนออกจากคันโยกของลิมิตสวิตช์ SQ และหน้าสัมผัสจะปิด
เมื่อปล่อยปุ่มสตาร์ท SB1 และหน้าสัมผัสเปิด ขดลวด KM ของสตาร์ทเตอร์แบบแม่เหล็กจะรับพลังงานผ่านหน้าสัมผัสของลิมิตสวิตช์ SQหลังจากเดินหน้าแล้วถอยหลังลูกสูบจะกดคันโยกของลิมิตสวิตช์ SQ หน้าสัมผัสจะเปิดขึ้นและขดลวด KM จะปิด สิ่งนี้จะทำให้หน้าสัมผัส KM ในวงจรไฟฟ้าเปิดและหยุดมอเตอร์ไฟฟ้า
วงจรที่พิจารณาประกอบด้วยวงจรไฟฟ้าและวงจรควบคุม ในอนาคตจะมีการพิจารณาเฉพาะรูปแบบการควบคุมเท่านั้น
ตามหน้าที่ เช่น โดยจุดประสงค์ องค์ประกอบทั้งหมดที่เกี่ยวข้องในการทำงานของวงจรสามารถแบ่งออกเป็นสามกลุ่ม: หน้าสัมผัสควบคุม องค์ประกอบระดับกลาง และองค์ประกอบผู้บริหาร
ผู้ติดต่อควบคุมเป็นองค์ประกอบที่ออกคำสั่ง (ปุ่มควบคุม, สวิตช์, ลิมิตสวิตช์, ไพรมารีคอนเวอร์เตอร์, หน้าสัมผัสรีเลย์ ฯลฯ)
ชื่อขององค์ประกอบระดับกลางบ่งชี้ว่าพวกมันอยู่ในตำแหน่งกึ่งกลางระหว่างองค์ประกอบการควบคุมและผู้บริหาร ในวงจรหน้าสัมผัสรีเลย์ ได้แก่ รีเลย์เวลาและรีเลย์ระดับกลาง และในวงจรแบบไม่สัมผัส — ลอจิกเกต.
องค์ประกอบของผู้บริหารคือกลไกการบริหาร อย่างไรก็ตามเมื่อพัฒนาวงจรควบคุมกลไกขับเคลื่อนเอง (มอเตอร์ไฟฟ้าหรือองค์ประกอบความร้อน) จะไม่ได้ใช้ แต่อุปกรณ์ที่รวมอยู่เช่น สตาร์ทแม่เหล็ก คอนแทค ฯลฯ
หน้าสัมผัสควบคุมทั้งหมดตามหลักการทำงานแบ่งออกเป็นห้าประเภท: เริ่มสัมผัสด้วยการกระทำสั้น (PC) เริ่มสัมผัสด้วยการกระทำยาว (PD) หยุดสัมผัสกับการกระทำสั้น (ตกลง) หยุดสัมผัสกับการกระทำยาว (OD ), หน้าสัมผัส start-stop (ซอฟต์แวร์) ผู้ติดต่อเหล่านี้เรียกว่าผู้ติดต่อหลัก
Cyclograms ของการทำงานของหน้าสัมผัสทั่วไปทั้งหมดในการควบคุมกลไกแบบวงกลมแสดงในรูปที่ 2.
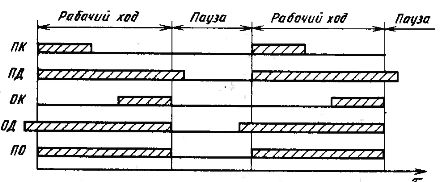
ข้าว. 2.Cyclogram ของหน้าสัมผัสควบคุม
ผู้ติดต่อแต่ละรายจากห้ารายเริ่มทำงาน (ปิด) และสิ้นสุด (เปิด) ในช่วงเวลาที่กำหนด ดังนั้นผู้ติดต่อเริ่มต้นจึงเริ่มทำงานพร้อมกับจุดเริ่มต้นของจังหวะการทำงาน แต่ผู้ติดต่อ YAK หยุดทำงานในช่วงจังหวะการทำงาน OD - ระหว่างการหยุดชั่วคราวนั่นคือพวกเขาจะแตกต่างกันเฉพาะในช่วงเวลาที่ปิด ( เปิด).
การหยุดการติดต่อซึ่งไม่เหมือนกับการติดต่อเริ่มต้น หยุดทำงานพร้อมกันกับจุดสิ้นสุดของจังหวะการทำงาน แตกต่างกันในช่วงเวลาของการรวม (ปิด) ผู้ติดต่อหยุดตกลงเริ่มต้นการทำงานระหว่างจังหวะการทำงานและผู้ติดต่อ OD - ระหว่างการหยุดชั่วคราว เฉพาะผู้ติดต่อของซอฟต์แวร์เท่านั้นที่จะเริ่มทำงานร่วมกับจุดเริ่มต้นของหลักสูตรการทำงานและสิ้นสุดเมื่อสิ้นสุด
ด้วยความช่วยเหลือจากผู้ติดต่อหลัก 5 รายที่พิจารณาแล้ว เป็นไปได้ที่จะได้รับโครงร่างสี่แบบสำหรับการควบคุมองค์ประกอบระดับบริหารและระดับกลาง ซึ่งเรียกว่า โครงร่างทั่วไป (รูปที่ 3)

ข้าว. 3. รูปแบบการควบคุมทั่วไปสำหรับวงจรผู้บริหารและระดับกลาง
วงจรทั่วไปอันแรก (รูปที่ 3, a) มีหน้าสัมผัสควบคุมซอฟต์แวร์เพียงอันเดียว หากปิดอยู่ กระแสไฟฟ้าจะไหลผ่านแอคชูเอเตอร์ X และหากเปิดอยู่ จะไม่มีกระแสไหล ผู้ติดต่อ PO มีความหมายในตัวเองและผู้ติดต่ออื่น ๆ ทั้งหมดจะต้องใช้เป็นคู่ (เริ่มและหยุด)
วงจรทั่วไปที่สองมีหน้าสัมผัสควบคุมสองตัวที่มีการทำงานต่อเนื่อง: PD และ OD (รูปที่ 3, b)
วงจรทั่วไปที่สามประกอบด้วยหน้าสัมผัสเริ่มต้นของคอมพิวเตอร์และหน้าสัมผัสหยุด OD นอกเหนือจากหน้าสัมผัสควบคุมแล้ว วงจรนี้ควรมีหน้าสัมผัสบล็อก x ซึ่งแอคทูเอเตอร์ X จะยังคงรับพลังงานต่อไปหลังจากหน้าสัมผัสเริ่มต้นของ คอมพิวเตอร์เปิดอยู่ (รูปที่ 3, c)
รูปแบบทั่วไปที่สี่ขึ้นอยู่กับการติดต่อระยะสั้นสองรายการ: เริ่มคอมพิวเตอร์และหยุด ตกลง เชื่อมต่อแบบขนาน (รูปที่ 3, d)
โครงร่างทั่วไปสี่แบบที่กำหนดอนุญาตให้ (ราวกับว่ามาจากลูกบาศก์) สร้างโครงร่างอนุกรมแบบขนานที่ซับซ้อนสำหรับการควบคุมผู้ติดต่อ ตัวอย่างเช่น รูปแบบการควบคุมคานภายใต้การพิจารณา (ดูรูปที่ 1) จะขึ้นอยู่กับรูปแบบทั่วไปที่สี่ ใช้ปุ่มกด SB1 เป็นหน้าสัมผัสเริ่มต้นระยะสั้นและสวิตช์จำกัด SQ เป็นหน้าสัมผัสหยุดระยะสั้น
เมื่อจัดทำโครงร่างการควบคุมโดยใช้วิธีการที่ใช้งานง่ายจำเป็นต้องกำหนดประเภทของผู้ติดต่อควบคุมอย่างถูกต้องนั่นคือระยะเวลาของการดำเนินการ
พิจารณาตัวอย่างการพัฒนารูปแบบการควบคุมโดยใช้วิธีการที่เข้าใจง่ายโดยใช้รูปแบบทั่วไป
จำเป็นต้องพัฒนาอุปกรณ์กึ่งอัตโนมัติสำหรับควบคุมตัวเหนี่ยวนำและอุปกรณ์สำหรับการฉีดพ่นการติดตั้งที่ออกแบบมาเพื่อให้ความร้อนแก่ผลิตภัณฑ์ด้วยกระแสความถี่สูงจากนั้นจึงระบายความร้อนด้วยหัวฉีดน้ำ เวลาในการทำความร้อนของผลิตภัณฑ์ในตัวเหนี่ยวนำคือ 12 วินาที และเวลาในการทำความเย็นคือ 8 ชั่วโมง ผลิตภัณฑ์ได้รับการติดตั้งด้วยตนเองในตัวเหนี่ยวนำ
ขั้นแรก เราจะวิเคราะห์การทำงานของอุปกรณ์กึ่งอัตโนมัติและกำหนดองค์ประกอบผู้บริหารและระดับกลางทั้งหมด ผู้ปฏิบัติงานติดตั้งผลิตภัณฑ์ในตัวเหนี่ยวนำด้วยตนเองและกดปุ่มเริ่มต้นณ จุดนี้ ตัวเหนี่ยวนำจะเปิดขึ้นและเริ่มให้ความร้อนแก่ผลิตภัณฑ์ ในเวลาเดียวกันควรเปิดรีเลย์เวลาโดยคำนึงถึงเวลาในการทำความร้อน (12 วินาที)
รีเลย์เวลานี้ (แม่นยำยิ่งขึ้นหน้าสัมผัส) จะปิดตัวเหนี่ยวนำและเปิดสปริงเกลอร์ซึ่งจ่ายน้ำเพื่อระบายความร้อน ในเวลาเดียวกันต้องเปิดรีเลย์ตัวที่สองเพื่อนับถอยหลังเวลาทำความเย็นนั่นคือเพื่อปิดเครื่องพ่น ด้วยวิธีนี้ จำเป็นต้องควบคุมองค์ประกอบทั้งสี่: ตัวเหนี่ยวนำ อุปกรณ์สเปรย์ และรีเลย์เวลาสองตัว
ตัวเหนี่ยวนำเปิดและปิดผ่านคอนแทค ซึ่งเป็นสาเหตุที่จำเป็นต้องควบคุมตัวเหนี่ยวนำ เครื่องพ่นสารเคมีถูกควบคุมโดยโซลินอยด์วาล์ว
กำหนดขดลวด (ขดลวด) ของคอนแทค KM1, ขดลวดของโซลินอยด์วาล์ว KM2 และขดลวดของรีเลย์เวลา KT1 และ K.T2 ตามลำดับ ดังนั้นเราจึงมีแอคทูเอเตอร์สองตัว: KM1 และ KM2 และองค์ประกอบระดับกลางสองตัว: KT1 และ KT2
จากการวิเคราะห์พบว่าความร้อนควรเริ่มก่อนนั่นคือขดลวด KM1 จะตื่นเต้น ปุ่มทริกเกอร์ SB (การทำงานแบบสั้น) ใช้เป็นหน้าสัมผัสเริ่มต้น ดังนั้นจึงสามารถใช้รูปแบบทั่วไปที่สามหรือสี่ได้
ให้ถอดตัวเหนี่ยวนำออกจากหน้าสัมผัสของไทม์รีเลย์ KT1.1 ซึ่งในกรณีนี้คือหน้าสัมผัสที่ออกฤทธิ์นาน ดังนั้นเราจึงเลือกรูปแบบทั่วไปที่สาม พร้อมกันกับขดลวดของสตาร์ทเตอร์แม่เหล็ก KM1 จำเป็นต้องเปิดไทม์รีเลย์ KT1 ซึ่งทำได้ง่ายมากโดยเชื่อมต่อแบบขนาน
พิจารณาการทำงานของวงจรผลลัพธ์ (รูปที่ 4, a)
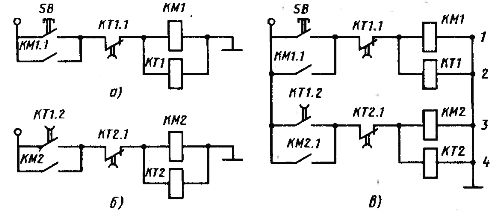
ข้าว. 4.วงจรควบคุม: a — ตัวเหนี่ยวนำและรีเลย์สำหรับเวลาทำความร้อน b — อุปกรณ์สปริงเกลอร์และรีเลย์ระบายความร้อน c — การติดตั้งโดยรวม
เมื่อคุณกดปุ่มเริ่มต้น SB คอยล์ของคอนแทค KM1 จะถูกกระตุ้น นั่นคือ ความร้อนของผลิตภัณฑ์จะเริ่มต้นขึ้น ในเวลาเดียวกัน คอยล์ของไทม์รีเลย์ KT1 จะถูกกระตุ้นและเริ่มนับเวลาการทำความร้อน ด้วยความช่วยเหลือของหน้าสัมผัสการปิดกั้น KM1.1 แรงดันไฟฟ้าของขดลวด KM1 จะยังคงอยู่แม้หลังจากปล่อยปุ่มทริกเกอร์ SB เช่น หลังจากเปิดรายชื่อแล้ว
หลังจากเวลาทำความร้อนหมดลง รีเลย์เวลา KT1 จะทำงาน หน้าสัมผัส KT1.1 จะเปิดขึ้น ซึ่งจะทำให้คอยล์ KM1 ดับ (การทำความร้อนของผลิตภัณฑ์จะสิ้นสุดลง) ตอนนี้ควรเปิดเครื่องพ่นสารเคมี สามารถเปิดได้ตามเวลารีเลย์ KT1 โดยการปิดหน้าสัมผัส เมื่อเปิดเครื่องพ่น รีเลย์ตั้งเวลา KT1 จะปิด ดังนั้นผู้ติดต่อปิด KT1.1 จะเป็นผู้ติดต่อระยะสั้น ดังนั้นเราจะใช้รูปแบบทั่วไปที่สามอีกครั้ง
พร้อมกันกับเครื่องพ่นสารเคมีจำเป็นต้องเปิดรีเลย์เวลา KT2 ซึ่งจะนับเวลาระบายความร้อน เพื่อจุดประสงค์นี้เราจะใช้เทคนิคที่ใช้และเชื่อมต่อขดลวดของรีเลย์เวลา KT2 ขนานกับขดลวด KM2 ดังนั้นเราจึงได้รูปแบบการควบคุมที่สอง (รูปที่ 4, b) เมื่อรวมวงจรทั้งสองเข้าด้วยกัน (รูปที่ 4, a และ b) เราจะได้รูปแบบการควบคุมทั่วไป (รูปที่ 4, c)
ให้เราพิจารณาการทำงานของวงจรโดยรวม (รูปที่ 4, c) เมื่อคุณกดปุ่มเริ่ม SB ขดลวดของคอนแทค KM1 และไทม์รีเลย์ KT1 จะถูกกระตุ้นและผลิตภัณฑ์จะเริ่มร้อนขึ้นหลังจาก 12 วินาที ไทม์รีเลย์ KT1 จะทำงานและหน้าสัมผัสในวงจร 1 จะเปิดขึ้นและในวงจร 2 จะปิด ผลิตภัณฑ์จะเริ่มเย็นลง พร้อมกันกับขดลวด KM2 ของโซลินอยด์วาล์ว รีเลย์เวลา K จะถูกกระตุ้น T2 โดยนับเวลาระบายความร้อน เมื่อหน้าสัมผัส KT2.1 (วงจร 3) เปิดขึ้น วาล์ว KM2 และรีเลย์เวลา KT2 จะปิด และ วงจรจะกลับสู่ตำแหน่งเดิม
รูปแบบการควบคุมตัวเหนี่ยวนำและสปริงเกอร์ได้รับการพัฒนาโดยใช้วิธีการที่ใช้งานง่าย อย่างไรก็ตาม ไม่มีหลักฐานว่าแผนการนี้จะถูกต้องและเหมาะสมที่สุด คำถามเกี่ยวกับความสามารถในการทำงานของวงจรสามารถแก้ไขได้หลังจากการผลิตและการตรวจสอบเชิงทดลองอย่างรอบคอบเท่านั้น นี่เป็นข้อเสียเปรียบที่ใหญ่ที่สุดของวิธีการที่ใช้งานง่าย ข้อบกพร่องที่ระบุไว้ไม่มีอยู่ในวิธีการวิเคราะห์ วิธีการวิเคราะห์สำหรับการพัฒนารูปแบบการควบคุมจะกล่าวถึงในบทความถัดไป