การควบคุมมอเตอร์เป็นฟังก์ชันของกระแส
 การควบคุมมอเตอร์สามารถทำได้ขึ้นอยู่กับความแรงของกระแสสเตเตอร์ วงจรสตาร์ทเป็นฟังก์ชันของกระแสของมอเตอร์เหนี่ยวนำแบบพัน-โรเตอร์แสดงในรูปที่ 1 ก.
การควบคุมมอเตอร์สามารถทำได้ขึ้นอยู่กับความแรงของกระแสสเตเตอร์ วงจรสตาร์ทเป็นฟังก์ชันของกระแสของมอเตอร์เหนี่ยวนำแบบพัน-โรเตอร์แสดงในรูปที่ 1 ก.
ในขณะที่เริ่มต้นกระแสจะถึงค่า I1 และหลังจากช่วงเวลาหนึ่งค่าจะลดลงเป็นค่า I2 (รูปที่ b) ณ จุดนี้ ส่วนหนึ่งของความต้านทานเริ่มต้นในวงจรโรเตอร์จะลัดวงจรโดยอัตโนมัติ กระแสจะเพิ่มขึ้นเป็นค่า I1 จากนั้นลดลงอีกครั้งเป็นค่า I2 ซึ่งทำให้อีกส่วนหนึ่งของความต้านทานเริ่มต้นสั้นลง กระบวนการนี้ทำซ้ำจนกว่าความต้านทานเริ่มต้นทั้งหมดจะลัดวงจร เพื่อจุดประสงค์เหล่านี้จะใช้รีเลย์กระแสเกินซึ่งขดลวดจะรวมอยู่ในวงจรไฟฟ้าของมอเตอร์
เมื่อคุณคลิกที่ ปุ่มเริ่มต้น SB1 (ดูรูปที่ A) เปิดใช้งานคอนแทค KM ซึ่งเป็นหน้าสัมผัสหลักที่เชื่อมต่อมอเตอร์กับเครือข่ายที่ความต้านทานเริ่มต้นทั่วไปในวงจรโรเตอร์ ในกรณีนี้คอยล์ของรีเลย์ KA จะได้รับพลังงานซึ่งหน้าสัมผัสเปิดซึ่งอยู่ในวงจรของคอยล์เร่ง K1รีเลย์ KA ถูกตั้งค่าเพื่อให้เวลาตอบสนองสั้นกว่าคอนแทค K1 นอกจากนี้ยังทำลายหน้าสัมผัสที่ค่าสูงสุดที่อนุญาต เริ่มต้นในปัจจุบัน เปิดและเมื่อกระแสลดลงถึงค่าการสลับจะปิดอีกครั้งเนื่องจากขดลวด K1 เปิดอยู่ผ่านหน้าสัมผัสของรีเลย์ KA ในขณะที่เกิดการลัดวงจรของระยะต้านทานเริ่มต้น
รีเลย์ KA จะทำงานก่อนที่คอนแทคเตอร์เร่งความเร็ว K1 จะทำงาน และมอเตอร์จะเร่งความเร็วเมื่อความต้านทานเริ่มต้นทำงานเต็มที่ เมื่อกระแสสลับเริ่มต้นลดลง หน้าสัมผัสของรีเลย์ KA จะปิดและขดลวด K1 จะเปิดขึ้น ในเวลาเดียวกัน หน้าสัมผัส K1 จะปิดลง โดยให้คอยล์จ่ายกำลังเองโดยไม่ขึ้นกับรีเลย์ KA และหน้าสัมผัสในวงจรควบคุมจะเปิดขึ้น ป้องกันการรวมคันเร่ง K2 ก่อนเวลาอันควร
เนื่องจากหน้าสัมผัสแหล่งจ่าย K1 เป็นส่วนหนึ่งของการลัดวงจรของความต้านทานเริ่มต้น กระแสของสเตเตอร์จึงเพิ่มขึ้นเป็นค่าสูงสุดและรีเลย์ KA จะเปิดหน้าสัมผัสในวงจรจ่ายของขดลวด K2 เมื่อทริกเกอร์ เมื่อมอเตอร์มีความเร็วเพียงพอและกระแสสเตเตอร์ลดลงกลับสู่กระแสสลับ หน้าสัมผัสของรีเลย์ KA จะปิดและเปิดคอยล์ K2 ซึ่งจะลัดวงจรความต้านทานเริ่มต้นระยะที่สองไปยังหน้าสัมผัส
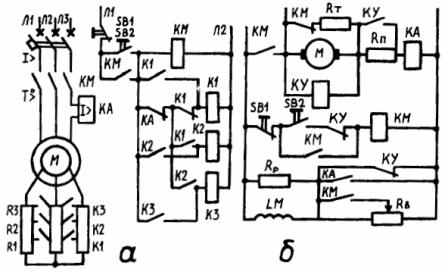
ข้าว. 1. วงจรควบคุมขึ้นอยู่กับกระแส: a — มอเตอร์แบบอะซิงโครนัสพร้อมเฟสโรเตอร์; b — มอเตอร์กระแสตรงพร้อมการกระตุ้นแบบขนาน
ในกรณีนี้ กระแสสเตเตอร์จะเพิ่มขึ้นอีกครั้ง รีเลย์ KA จะทำงานและเปิดหน้าสัมผัส คอยล์ K2 จะไม่สูญเสียพลังงานเนื่องจากจะมีเวลาปิดด้วยหน้าสัมผัสเสริม K2กระแสสเตเตอร์ที่ลดลงอีกหลังจากการเร่งความเร็วครั้งต่อไปจะทำให้ขดลวด K3 เปิดขึ้นและลัดวงจรในขั้นตอนสุดท้ายของความต้านทานเริ่มต้น การกดปุ่ม SB จะหยุดมอเตอร์และวงจรพร้อมสำหรับการสตาร์ทครั้งต่อไป การใช้รีเลย์ปัจจุบันที่กำหนดค่าให้ส่งกลับที่กระแส 12 ไดรฟ์ไฟฟ้าต่างๆ สามารถหยุดและย้อนกลับได้ ข้อเสียของวงจรควบคุมในฟังก์ชั่นปัจจุบันคือจำนวนหน้าสัมผัสที่ค่อนข้างมาก
สำหรับการควบคุมมอเตอร์กระแสตรงแบบขนานหลายกิโลวัตต์แบบย้อนกลับไม่ได้ สามารถใช้รีโอสแตทสตาร์ทแบบขั้นตอนเดียวได้ (ดูรูปที่ ค) แผนภาพแสดง: การควบคุมความต้านทาน RB ในวงจรกระตุ้น ความต้านทานการปลดปล่อย Rp เชื่อมต่อแบบขนานกับขดลวดกระตุ้น LM; ความต้านทานการเบรก RT ที่เชื่อมต่อแบบขนานกับกระดอง M เมื่อตัดการเชื่อมต่อจากเครือข่ายและความต้านทานเริ่มต้น RP ที่เชื่อมต่อเป็นอนุกรมกับวงจรกระดองระหว่างช่วงเริ่มต้น เพื่อสร้างฟลักซ์สูงสุดเมื่อเริ่มต้น ขดลวดฟิลด์ LM ในตำแหน่งเริ่มต้นจะเปิดที่แรงดันไฟฟ้าเต็ม
เมื่อกดปุ่ม SB2 กระดองของมอเตอร์จากคอนแทคสาย KM จะเชื่อมต่อแบบอนุกรมกับเครือข่ายที่มีความต้านทาน RP รีเลย์ควบคุมสตาร์ท SC ทำงานเป็นฟังก์ชันของกระดองปัจจุบัน เมื่อกระแสเพิ่มขึ้น หน้าสัมผัสปิดของ KA จะควบคุมความต้านทาน RB ทำให้ฟลักซ์แม่เหล็กกระตุ้นเพิ่มขึ้น และเมื่อกระแสลดลง หน้าสัมผัสของ KA จะเปิดขึ้นและขดลวด LM จะเชื่อมต่อเป็นอนุกรมกับความต้านทานของรีโอสแตท RB เนื่องจาก ซึ่งกระแสแม่เหล็กจะลดลง
เมื่อมอเตอร์สตาร์ท กระแสกระดองสตาร์ทที่เพิ่มขึ้นจะเปิดรีเลย์ KA และขดลวด LM จะสร้างฟลักซ์สูงสุด เมื่อถึงความเร็วที่กำหนด คอนแทคเร่งความเร็ว K จะเปิดขึ้น ความต้านทานเริ่มต้น RP จะลัดวงจร หลังจากนั้นมอเตอร์จะทำงานตามลักษณะตามธรรมชาติ เมื่อกระแสกระดองลดลง (อันเป็นผลมาจากการเร่งความเร็วของมอเตอร์) ก่อนที่รีเลย์ KA จะเปิดขึ้น หน้าสัมผัส KA ในวงจรกระตุ้นจะเปิดขึ้น
ขดลวด LM จะเปิดเป็นชุดพร้อมกับความต้านทาน RB ทำให้ฟลักซ์ของสนามอ่อนลงและกระแสกระดองจะเพิ่มขึ้นตามลำดับ รีเลย์ KA จะทำงานอีกครั้ง เพิ่มฟลักซ์และเพิ่มความเร็วมอเตอร์พร้อมกัน ระหว่างการเริ่มต้น รีเลย์ของยานอวกาศจะถูกกระตุ้นหลายครั้งจนกว่ามอเตอร์จะมีความเร็วถึงความเร็วที่กำหนดโดยรีโอสแตตควบคุม RB อุปกรณ์สั่นดังกล่าวทำงานเป็นฟังก์ชันปัจจุบันทำให้วงจรง่ายขึ้นเมื่อเทียบกับวงจรควบคุมเป็นฟังก์ชันของเวลา
เมื่อเปิดมอเตอร์โดยการกดปุ่ม SB1 กระดองจะเปิดจากหน้าสัมผัสเปิด KM ไปยังตัวต้านทานการเบรก RT และการเบรกแบบไดนามิกจะดำเนินการโดยอัตโนมัติ ที่จุดเริ่มต้นของการหยุดสนามแม่เหล็กจะอ่อนลงเล็กน้อยเนื่องจากการเปิดของหน้าสัมผัส KM บนแถบเลื่อนของรีโอสแตตควบคุมและกระแสกระตุ้นจะผ่าน RB ความต้านทานทั้งหมด เมื่อความเร็วมอเตอร์ลดลงไปอีก คอนแทคเร่งความเร็ว K จะไม่ทำงานและฟลักซ์จะเพิ่มขึ้นเมื่อขดลวดกระตุ้นเปิดเป็นแรงดันไฟฟ้าเต็มสายผ่านหน้าสัมผัสเปิด K ส่งผลให้แรงบิดในการเบรกเพิ่มขึ้น