คอนแทคควบคุมและวงจรป้องกันมอเตอร์
 มีวงจรควบคุมมอเตอร์คอนแทคที่แตกต่างกันขึ้นอยู่กับฟังก์ชันที่จะดำเนินการ
มีวงจรควบคุมมอเตอร์คอนแทคที่แตกต่างกันขึ้นอยู่กับฟังก์ชันที่จะดำเนินการ
รูปที่ 1a แสดงโครงร่างรวมของสตาร์ทเตอร์แบบแม่เหล็กที่เปลี่ยนกลับไม่ได้... ในนั้นการจัดเรียงองค์ประกอบสอดคล้องกับการจัดเรียงตามธรรมชาติ นั่นคือองค์ประกอบทั้งหมดที่อยู่ในกล่องสตาร์ทจะถูกจัดกลุ่มทางด้านซ้ายของไดอะแกรมและ สถานีปุ่มกดพร้อมปุ่ม «เริ่ม» และ «หยุด» แสดงทางด้านขวาของแผนภาพ
สถานีปุ่มมักจะอยู่ห่างจาก สตาร์ทแม่เหล็ก… เพื่อให้เข้าใจหลักการทำงานของวงจรควบคุมมอเตอร์ มักใช้ไดอะแกรมแบบละเอียด (พื้นฐาน) (รูปที่ 1.b) เมื่อกดปุ่มเริ่ม SB2 วงจรคอยล์คอนแทค KM จะปิดลง ซึ่งรวมถึงหน้าสัมผัส KM สามตัวของวงจรจ่ายมอเตอร์ ในกรณีนี้ หน้าสัมผัสบล็อก KM ที่เชื่อมต่อขนานกับปุ่มเริ่มต้น SB2 จะปิดลงเช่นกัน สิ่งนี้ทำให้คุณสามารถกระตุ้นขดลวด KM เมื่อปล่อยปุ่ม SB2
มอเตอร์หยุดทำงานโดยการกดปุ่ม SB1 ขณะที่คอยล์ดับและปล่อยหน้าสัมผัสพลังงาน (หลัก) และหน้าสัมผัสเสริม เมื่อปล่อยปุ่ม SB1 วงจรของขดลวด KM จะไม่ทำงาน หากต้องการสตาร์ทเครื่องยนต์ใหม่ ให้กดปุ่ม SB2 อีกครั้ง
วงจรนี้ยังให้การป้องกันที่เรียกว่าศูนย์นั่นคือหากแรงดันไฟหลักหายไปหรือลดลงถึง 50-60% ของค่าเล็กน้อย ขดลวด KM จะไม่ยึดหน้าสัมผัสพลังงาน KM และมอเตอร์จะปิด เมื่อแรงดันไฟฟ้าปรากฏขึ้นหรือเพิ่มขึ้นเป็นค่าที่ใกล้เคียงกับค่าเล็กน้อย แม่เหล็กสตาร์ทเตอร์จะไม่ทำงานโดยธรรมชาติ หากต้องการเปิดใช้งาน คุณต้องกดปุ่มเริ่มต้นอีกครั้ง
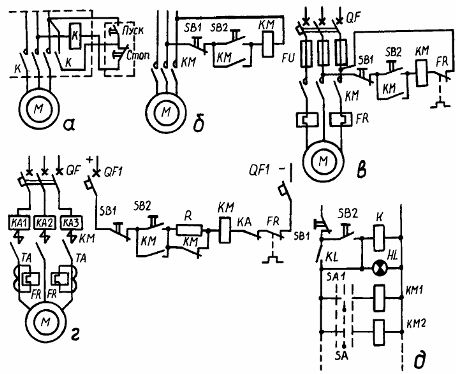
ข้าว. 1. แผนการควบคุมมอเตอร์และการป้องกัน: a - แบบรวมและ b - แบบละเอียดของสตาร์ทแม่เหล็กแบบย้อนกลับไม่ได้ c — การป้องกันเครื่องยนต์โดยใช้ฟิวส์และรีเลย์ความร้อน d — ไดอะแกรมของสถานีควบคุมเครื่องยนต์ที่ทรงพลัง d - การป้องกันเป็นศูนย์จากรีเลย์ระดับกลาง
การป้องกันมอเตอร์จากความร้อนสูงเกินไปของขดลวดจะดำเนินการในระหว่างการโอเวอร์โหลดเป็นเวลานาน รีเลย์ความร้อน FR และการป้องกันการโอเวอร์โหลดขนาดใหญ่หรือการลัดวงจรมีให้โดยฟิวส์ FU หรือ เบรกเกอร์วงจร QF (รูปที่ 1, c) เพื่อป้องกันการโอเวอร์โหลดเป็นเวลานานจะใช้รีเลย์ระบายความร้อนสองตัว เนื่องจากรีเลย์หนึ่งตัวในกรณีที่ฟิวส์ขาด ในชุดที่เชื่อมต่อองค์ประกอบความร้อนของรีเลย์นี้ มอเตอร์จะเชื่อมต่อกับเครือข่ายเฟสเดียวและ พวกเขาจะไม่ได้รับการคุ้มครอง หน้าสัมผัสการแตกหักของรีเลย์เหล่านี้เชื่อมต่อแบบอนุกรมกับคอยล์สตาร์ท เมื่อหนึ่งในนั้นเปิดขึ้น ขดลวด KM จะหยุดทำงานและมอเตอร์จะหยุดทำงาน เช่นเดียวกับเมื่อกดปุ่ม SB1
สถานีควบคุมมอเตอร์กำลังสูงแสดงในรูปที่ 1, d. การป้องกันการลัดวงจรมีให้โดยโอเวอร์โหลดรีเลย์ KA1 — KA3 การป้องกันการโอเวอร์โหลดมีให้โดยรีเลย์ความร้อน FR ที่เชื่อมต่อผ่านหม้อแปลงกระแสไฟฟ้า ขดลวดของคอนแทคสามขั้วจ่ายกระแสตรง เพื่อลดกระแสในคอยล์คอนแทคหลังจากรวมเข้ากับวงจรแล้วจะมีการแนะนำความต้านทานเพิ่มเติม R ซึ่งก่อนหน้านี้ถูกทำให้สั้นลงโดย KM หน้าสัมผัสแบบเปิด
ในวงจรควบคุมแบบแมนนวลที่มีตัวควบคุม สวิตช์ หรืออุปกรณ์อื่นๆ หลายตัว รีเลย์ระดับกลางจะใช้เพื่อให้การป้องกันที่เป็นกลาง (รูปที่ 1, e) หากต้องการใช้แรงดันไฟฟ้ากับวงจรควบคุม ให้กดปุ่ม SB2 ซึ่งจะเป็นการเปิดรีเลย์กลาง K ซึ่งรวมถึงหน้าสัมผัสปิด K และไฟสัญญาณ HL ซึ่งแสดงว่ามีแรงดันไฟฟ้าอยู่ในวงจรควบคุม . หลังจากปล่อยปุ่ม SB2 คอยล์รีเลย์จะถูกบล็อกในขณะที่วงจรของคอนโทรลเลอร์ SM1, สวิตช์แพ็คเก็ต SM ฯลฯ และขดลวดของคอนแทค KM1, KM2 ฯลฯ จะได้รับพลังงาน
ในโครงร่างที่พิจารณา หน้าสัมผัสล็อคตัวเองมีความจำเป็นสำหรับการทำงานต่อเนื่องของมอเตอร์ ในทางปฏิบัติบ่อยครั้ง เครื่องยนต์จะต้องทำงานเมื่อกดปุ่มสตาร์ทเท่านั้น ตัวอย่างเช่น ในเครื่องยก ในกรณีนี้ ไม่มีปุ่มหยุดในวงจรควบคุม (รูปที่ 2, ก) บางครั้งจำเป็นต้องตรวจสอบการทำงานของไดรฟ์ในสองโหมด นั่นคือ เปิดใช้งานในช่วงเวลาสั้น ๆ เมื่อตั้งค่าเครื่องหรือเป็นเวลานาน จากนั้นด้วยการกดปุ่ม SB2 สั้น ๆ (รูปที่ 2.b) ขดลวดของคอนแทค KM จะเปิดขึ้นและหน้าสัมผัสล็อคตัวเองของ KM จะปิดในขณะที่มอเตอร์จะทำงานเมื่อปล่อยปุ่ม SB2 .
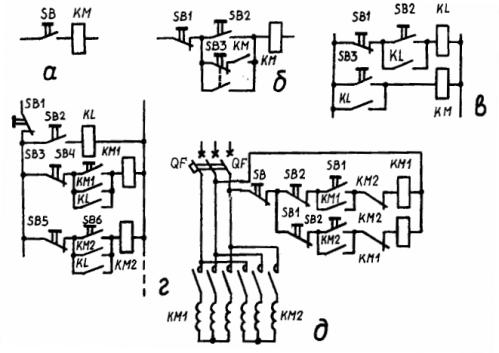
ข้าว. 2. ประเภทของวงจรควบคุมสำหรับมอเตอร์แบบอะซิงโครนัส: a - ในโหมดวิ่ง; b และ c — ระหว่างการทำงานเป็นเวลานานและการวิ่งเหยาะๆ d - การรวมเครื่องยนต์หลายตัวพร้อมกัน d - สตาร์ทมอเตอร์สองความเร็วแบบไม่ต่อเนื่อง
สำหรับโหมดควบคุมมอเตอร์ ให้กดปุ่ม SB3 หน้าสัมผัสปิดจะเปิดขดลวดของคอนแทค KM และหน้าสัมผัสเปิดจะตัดวงจรล็อคตัวเองของคอนแทค ข้อเสียของวงจรนี้คือหน้าสัมผัสเปิดของปุ่ม SB3 สามารถปิดก่อนที่หน้าสัมผัสของบล็อก KM จะเปิดขึ้นและมอเตอร์ไม่ดับ วงจรที่แสดงในรูป 2, f, ไม่มีข้อบกพร่องนี้
สำหรับการทำงานต่อเนื่อง การกดปุ่ม SB2 จะเป็นการเปิดรีเลย์กลาง K. หนึ่งในผู้ติดต่อ K จะเปิดคอยล์ของคอนแทค KM และอีกอันหนึ่งจะบล็อกปุ่ม SB2 พร้อมกัน ดังนั้นจึงเป็นการปิดการทำงานของเครื่องยนต์ด้วยปุ่มสตาร์ท ปล่อยแล้ว. ในการเริ่มการทำงาน ให้กดปุ่ม SB3 ค้างไว้ตามเวลาที่กำหนด
รูปที่ 2d แสดงรูปแบบการสตาร์ทมอเตอร์หลายตัวพร้อมกันจากปุ่มสตาร์ทเดียวโดยใช้รีเลย์ระดับกลาง ... ปุ่ม SB2 เปิดรีเลย์ K หน้าสัมผัสปิดที่เปิดคอยล์ของคอนแทค KM1, KM2 และอื่น ๆ พร้อมกัน หยุดมอเตอร์ทั้งหมดพร้อมกันด้วยปุ่ม SB1 หากต้องการเปิดและปิดมอเตอร์แต่ละตัวแยกกัน ให้ใช้ปุ่ม SB3, SB4 และ SB5, SB6 ฯลฯ ตามลำดับ
แผนภาพการเริ่มต้นแบบไม่มีขั้นตอนของมอเตอร์โรเตอร์กรงกระรอกแบบสองขดลวดความเร็วสองระดับที่แสดงในรูป 2, e ในการสตาร์ทเครื่องยนต์ด้วยความเร็วแรกจะใช้ปุ่ม SB1 ที่สอง - SB2ปุ่มทั้งสองถูกเชื่อมต่อกันทางกลไกเพื่อป้องกันไม่ให้เครื่องยนต์เข้าสู่ความเร็วสองระดับพร้อมกัน
วงจรสตาร์ทเตอร์ยังถูกปิดกั้นทางไฟฟ้าอีกด้วย ตัวอย่างเช่น เมื่อเปิดใช้งานคอยล์ KM1 หน้าสัมผัสเปิดจะตัดวงจรของคอยล์ KM2 โดยไม่รวมความเป็นไปได้ของการรวมเข้าด้วยกัน ในการเปลี่ยนเป็นความเร็วที่สองคุณต้องกดปุ่ม SB2 ในขณะที่วงจรของคอยล์ KM1 เสียและดับลง ขดลวดของวงจร KM2 รับพลังงานและเปิดมอเตอร์ด้วยความเร็วที่สอง
การควบคุมย้อนกลับของมอเตอร์แบบอะซิงโครนัสนั้นดำเนินการโดยใช้คอนแทคสองตัว (รูปที่ 3, a)
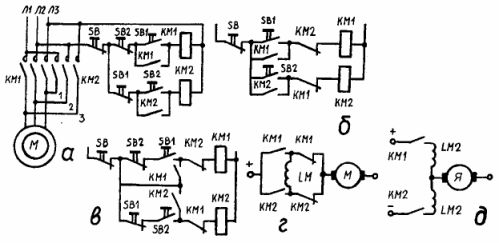
รูปที่. 3. แผนการควบคุมเครื่องยนต์: a - ตัวสตาร์ทแม่เหล็กแบบพลิกกลับได้พร้อมการปิดกั้นทางกล b - เหมือนกันกับการปิดกั้นด้วยไฟฟ้า ค — การรวมกันของตัวเลือก a และ b; d และ e — การสตาร์ทและการย้อนกลับของมอเตอร์กระแสตรงกำลังต่ำ
คอนแทคเตอร์ KM1 ใช้เพื่อต่อมอเตอร์ไปข้างหน้าและใช้ KM2 ในทางกลับกัน เพื่อป้องกันการเปิดคอนแทคสองตัวพร้อมกันโดยไม่ตั้งใจซึ่งนำไปสู่การลัดวงจรวงจรจะใช้ (ดูรูปที่ 3, a) การปิดกั้นทางกลร่วมกันด้วยหน้าสัมผัสสองปุ่มที่ขัดจังหวะ SB1 และ SB2 กดปุ่ม SB1 เปิด วงจรคอยล์ KM1 และปลดวงจรคอยล์ KM2
เมื่อกดปุ่ม SB1 และ SB2 พร้อมกัน วงจรของขดลวด KM1 และ KM2 จะขาดและคอนแทคเตอร์จะไม่ทำงาน การปิดกั้นดำเนินการโดยสองหน้าสัมผัสขัดจังหวะ KM2 และ KM1 ซึ่งรวมอยู่ในวงจรของขดลวด KM1 และ KM2 ตามลำดับ (รูปที่ 3, b) ในการย้อนกลับเครื่องยนต์ในรูปแบบนี้ คุณต้องกดปุ่ม SB ก่อน
วงจรในรูป 3, c คือการรวมกันของสองวงจรก่อนหน้านั่นคือมีการปิดกั้นสองครั้งปุ่ม SBI เปิดคอนแทค KM1 และวงจรของขดลวดของคอนแทค KM2 ถูกทำลายโดยการเปิดหน้าสัมผัสของปุ่ม SB1 และหน้าสัมผัสของบล็อก KM1 พร้อมกัน
รูปที่ 3, d และ e แสดงโครงร่างที่ง่ายที่สุดสำหรับการสตาร์ทและการย้อนกลับของมอเตอร์พลังงานต่ำที่ตื่นเต้นตามลำดับ ... มอเตอร์ดังกล่าวเชื่อมต่อกับเครือข่ายโดยไม่ต้องสตาร์ทรีโอสแตท ตามแผนภาพในรูป 3, d, การเริ่มต้นและการย้อนกลับของมอเตอร์ด้วยการกระตุ้นแบบอนุกรมนั้นดำเนินการโดยใช้รีเลย์ระดับกลางสองตัว มอเตอร์กลับทางโดยกลับทิศทางของกระแสในขดลวดสนาม LM ในมอเตอร์ที่มีขดลวดสนามสองชุดสร้างฟลักซ์แม่เหล็กในทิศทางตรงกันข้าม วงจรสวิตชิ่งและวงจรกลับมีหน้าสัมผัสเพียงสองหน้าสัมผัส (ดูรูปที่ 3, e)
ดังที่เห็นได้จากแผนการควบคุมที่พิจารณาแล้ว เป็นการง่ายที่สุดที่จะทำให้กระบวนการเริ่มต้นและย้อนกลับของมอเตอร์แบบอะซิงโครนัสของโรเตอร์กรงกระรอกเป็นไปโดยอัตโนมัติ ในกรณีนี้การควบคุมทั้งหมดเมื่อสตาร์ทจะลดลงเป็นการเชื่อมต่อมอเตอร์กับเครือข่ายไฟฟ้าและเมื่อหยุด - เพื่อตัดการเชื่อมต่อจากเครือข่าย
ซับซ้อนมากขึ้นคือระบบอัตโนมัติในการเริ่มต้น การหยุด และการหยุดของมอเตอร์เหนี่ยวนำที่มีเฟสคดเคี้ยวของโรเตอร์, มอเตอร์กรงกระรอกเหนี่ยวนำที่มีกำลังเพิ่มขึ้น, มอเตอร์กระแสตรงที่มีกำลังปานกลางและสูง, มอเตอร์เหนี่ยวนำหลายความเร็วพร้อมสเต็ปสตาร์ทเช่นกัน เป็นมอเตอร์ซิงโครนัส เครื่องยนต์เหล่านี้ถูกควบคุม เป็นฟังก์ชันของเวลา, ความเร็ว และ ปัจจุบัน.
นอกเหนือจากกรณีข้างต้นแล้ว ยังสามารถควบคุมเครื่องยนต์และ ตามหลักวิถีเมื่อเครื่องยนต์สตาร์ทและช้าลงเมื่อร่างกายทำงานถึงตำแหน่งที่แน่นอนในอวกาศระบบที่ทำหน้าที่ดังกล่าวเรียกว่าระบบวงเปิด เนื่องจากไม่มีการป้อนกลับระหว่างค่าเอาต์พุตและค่าอินพุต